chatgpt专题
微信小程序
闭包
计算机网络
harmonyos
lcd
postgresql
lua metatable
位置编码
ATECLOUD
批量
Pyhton
HuggingFace
定时器
paas
嵌入式数据库
UGUI
JDK17.0.2
文档管理
小程序毕业设计
仿真
2024/4/24 5:41:59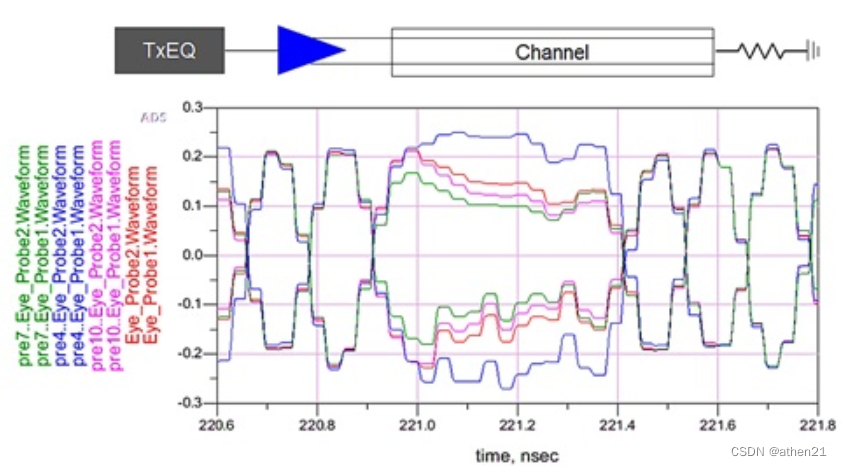
如何确保PCIe Gen3通道的信号质量
PCIe 3.0设计面对的挑战
PCIe由PCI-SIG协会研发和维护的一个高速标准接口,PCIe3.0是其开发的第三代接口高速差分接口,其单个差分对信号速率可到达8.0Gbps,目前其以广泛的应用于计算机服务器等设备领域。
下图显示的是一个典型的PCIe Gen3的…
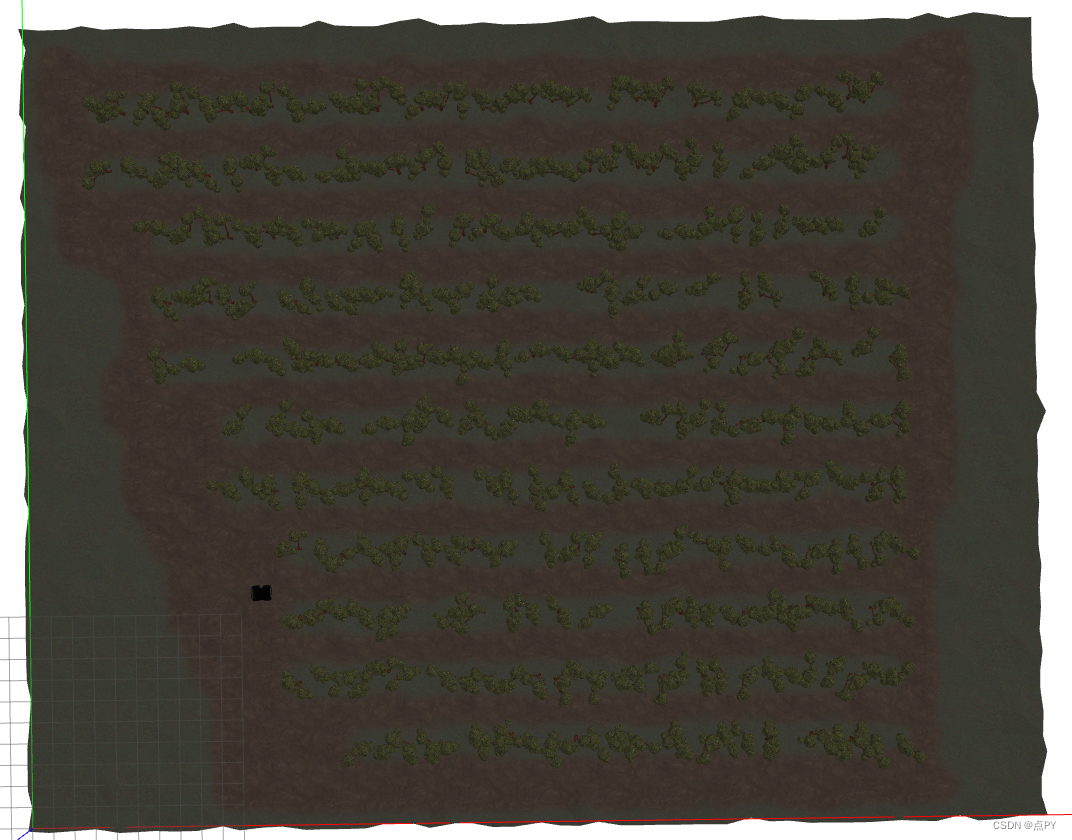
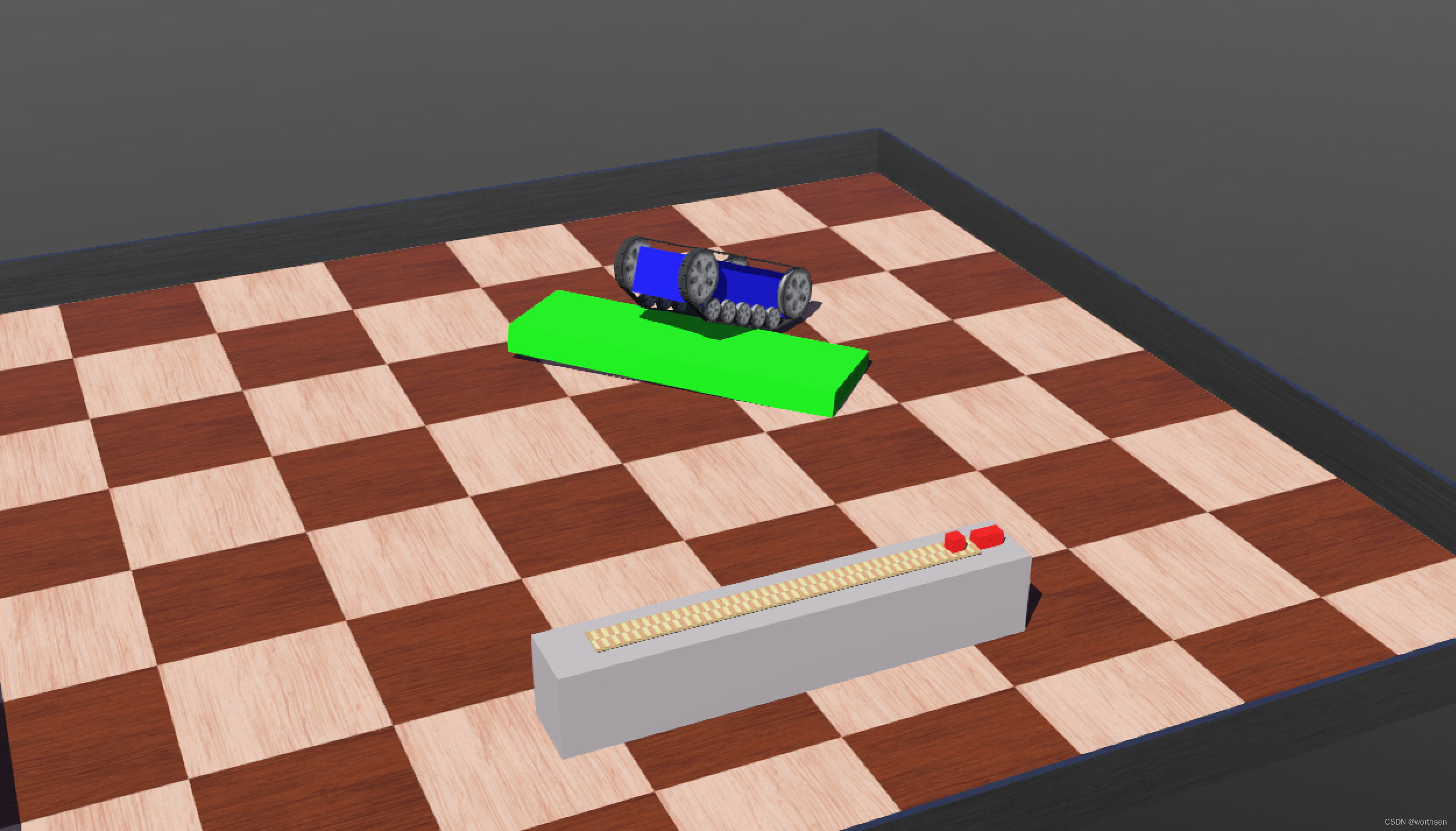
机器人在果园内行巡检仿真
文章目录 创建工作空间仿真果园场景搭建小车模型搭建将机器人放在仿真世界中创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws仿真果园场景搭建 cd ~/catkin_ws/src
git clone https://gitcode.com/clearpathrobotics/cpr_gazebo.git小车模型搭建
DiffBot是一种具有两个…

Altair® RapidMiner®数据分析与人工智能平台
无论您的组织处于数据旅程的哪个阶段,Altair RapidMiner 都能帮助您克服前进道路上的挑战性障碍。我们为成熟的数据分析团队提供现代化之路,也为刚刚起步的团队提供自动化之路。我们不需要您的组织从根本上改变人员、流程、计算环境或现有数据状况&#…

EDEM - Fluent - CFD风道耦合
EDEM - Fluent - CFD风道耦合 简述:利用多软件协同合作,建立耦合接口进行耦合 此篇利用了solid works 2016、 workbench 2018、EDEM 2018、Fluent 2018、CFD 2018五个软件,进行仿真耦合等的操作,具体流程如下 1、solid works建模得…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现原理…
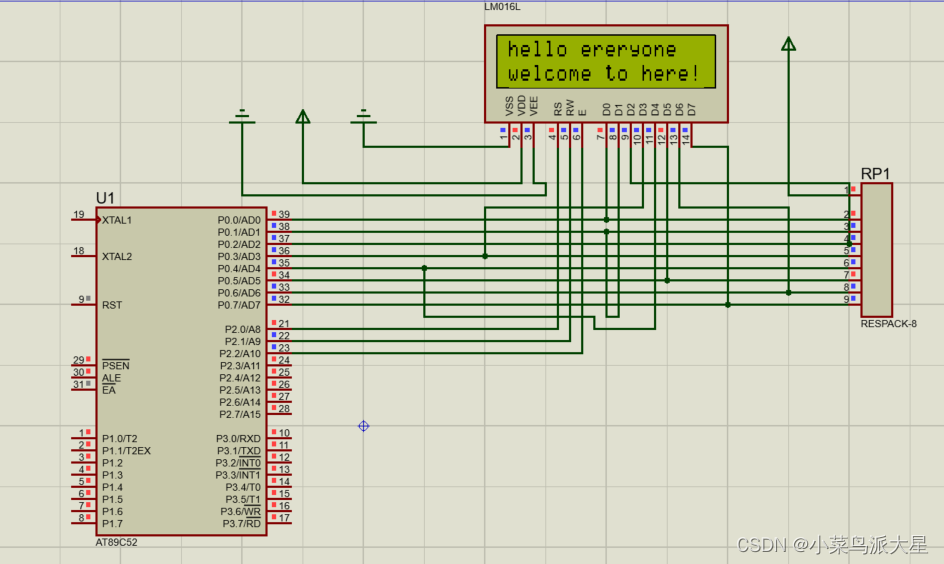
【单片机 TB作品】节拍器,电子音乐节拍器,51单片机,Proteus仿真
节拍器的使用可以使练琴者正确掌握乐曲的速度,从而使音 乐练习达到事半功倍的效果。本课题基于单片机设计具有声光晋 示的电子乐器节拍器,充分利用单片机的定时和中断系统,通过 C语言程序设计,控制外部相关硬件电路,实现对音乐速,度 40~120次/分钟范围内连续可调,节拍114、 2/4…

Qt+C++跑马灯-指示灯-风扇-虚线灯带-动画仿真
程序示例精选 QtC跑马灯-指示灯-风扇-虚线灯带-动画仿真 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对<<QtC跑马灯-指示灯-风扇-虚线灯带-动画仿真>>编写代码,代码整…
电路设计(27)——交通信号灯的multisim仿真
1.功能要求 使用数字芯片设计一款交通信号灯,使得: 主干道的绿灯时间为60S,红灯时间为45S 次干道的红灯时间为60S,绿灯时间为45S 主、次干道,绿灯的最后5S内,黄灯闪烁 使用数码管显示各自的倒计时时间。 按…
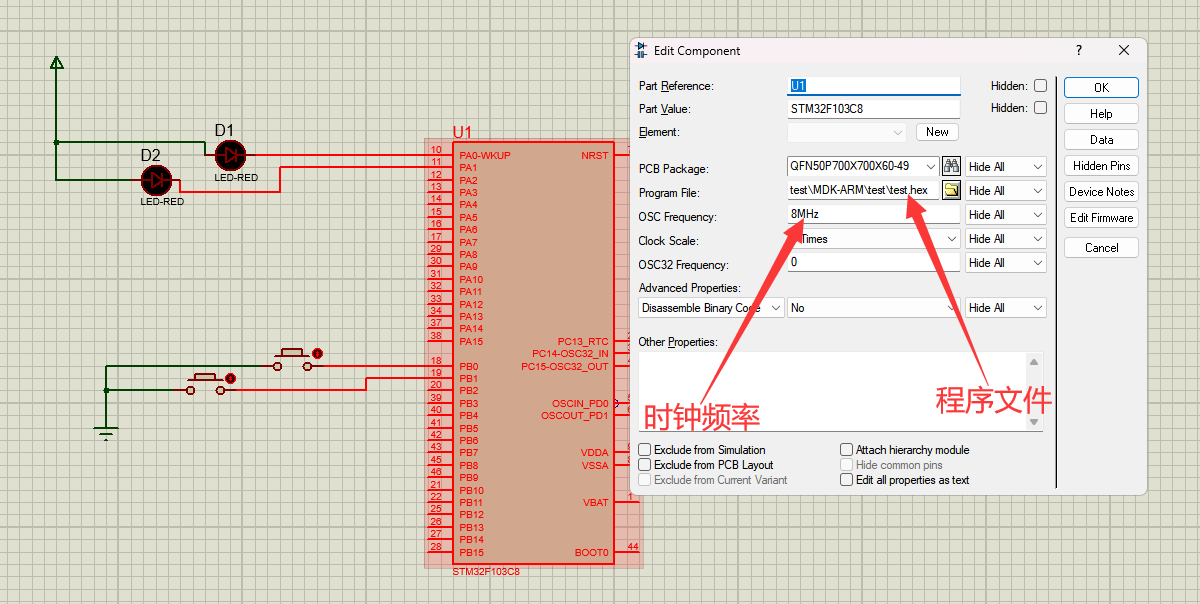
stm32利用CubeMX完成按键控制LED灯的点亮与熄灭
首先画电图,如下:(会话最小系统后就可以不画了,如果要是画实物的话必须要有的,不能忘,模拟就无所谓了) 然后是CubeMX设置时钟 这次使用的是内部8M时钟,这样能避免proteus闪退的情况&…

Echarts动态卡尔曼滤波
陈拓 2020/12/08-2020/12/19
1. 概述
在正弦波上叠加高斯白噪声,再用卡尔曼滤波滤除噪声。 相关文档: 《Echarts动态生成sin曲线》https://blog.csdn.net/chentuo2000/article/details/110622403 《Echarts动态产生高斯白噪声》https://blog.csdn.net/…
proteus结合keil-arm编译器构建STM32单片机项目进行仿真
proteus是可以直接创建设计图和源码的,但是源码编译它需要借助keil-arm编译器,也就是我们安装keil-mdk之后自带的编译器。 下面给出一个完整的示例,主要是做一个LED灯闪烁的效果。 新建工程指定路径,Schematic,PCB layout都选择默…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…

Verilator 用法
Verilating
… 威尔逊-斯奈德版权所有 2003-2023。 … SPDX 许可证标识符: 仅限 LGPL-3.0 或 Artistic-2.0 验证 Verilator 可通过五种主要方式使用: 使用 --cc 或 :vlopt:-sc 选项,Verilator 将分别把设计翻译成 C 或 SystemC 代码。 将设计…

席裕庚《预测控制》学习记录 (一)-基于阶跃响应的动态矩阵控制(DMC)包含仿真
本文除了黑体部分均为《预测控制》一书中的知识点,感觉像之前的ADRC只放个仿真不太好,就把原理也写上了
简介
模型预测控制(Model Predictive Control,MPC),或简称预测控制。 最早产生于工业过程的预测控制算法,…

ADRC控制算法仿真(基于MATALB和Simulink)
ADRC控制算法仿真(基于MATALB和Simulink)首先放仿真结果仿真文件下载重要提示:这个仿真存在一些错误,仅供参考。(经评论提示,仿真中存在一些问题,但这个帖子时间已经比较久了,做这个…

【光波电子学】基于MATLAB的多模光纤模场分布的仿真分析
基于MATLAB的多模光纤模场分布的仿真分析
一、引言
(1)多模光纤的概念
多模光纤(MMF)是一种具有较大纤芯直径的光纤结构,其核心直径通常在10-50微米范围内。与单模光纤(SMF)相比,…
电路设计(28)——交通灯控制器的multisim仿真
1.功能设定 南北、东西两道的红灯时间、绿灯时间均为24S,数码管显示倒计时。在绿灯的最后5S内,黄灯闪烁。有夜间模式:按下按键进入夜间模式。在夜间模式下,数码管显示计数最大值,两个方向的黄灯不停闪烁。 2.电路设计 …
电路设计(16)——纪念馆游客进出自动计数显示器proteus仿真
1.设计要求 设计、制作一个纪念馆游客进出自动计数显示器。 某县,有一个免费参观的“陶渊明故里纪念馆”,游客进出分道而行,如同地铁有确保单向通行的措施。在入口与出口处分别设有红外检测、声响、累加计数器装置,当游人进&#…

Altera FPGA PCIE 例程仿真
由于刚开始学PCIE接口,所以按照官方给的例程进行仿真操作。下面主要介绍下仿真的具体步骤。该例子是采用Cyclone V器件进行仿真,PCIE为gen1X4 的。Quartus II 版本号为15.0。Modelsim为ModelsimSE-64 10.4 1、拷贝工程 首先新建一个文件夹用以存放工程…
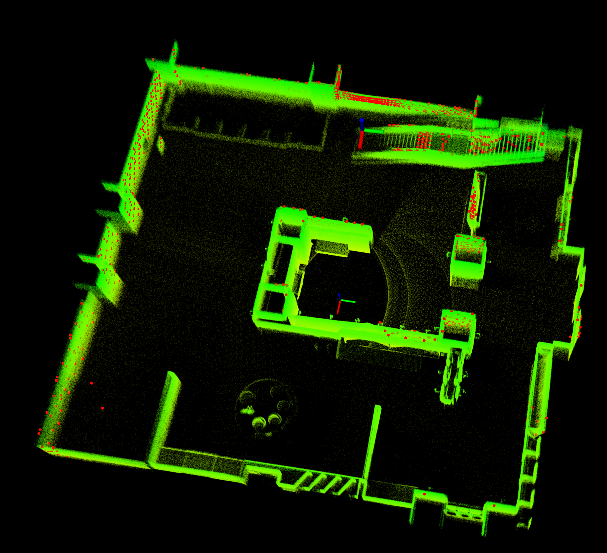
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
在gazebo里搭建一个livox mid360 惯导仿真平台测试 FAST-LIO2 前言立方体平台加入 livox mid360 激光雷达加入IMU模块调整底盘大小 并设计调用接口测试 Fast-Lio2 前言
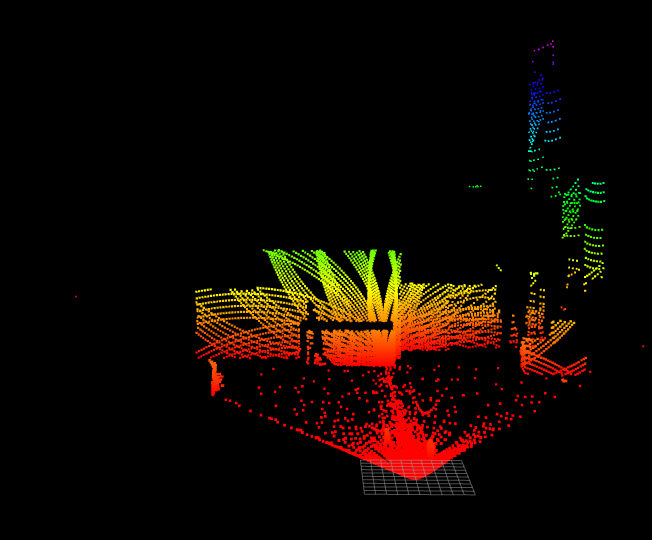
livox mid360 在官网一直没有货,在gazebo里可以仿真该雷达形式的点云。
但是其只发布雷达的数…

【AICFD案例教程】汽车外气动-AI加速
AICFD是由天洑软件自主研发的通用智能热流体仿真软件,用于高效解决能源动力、船舶海洋、电子设备和车辆运载等领域复杂的流动和传热问题。软件涵盖了从建模、仿真到结果处理完整仿真分析流程,帮助工业企业建立设计、仿真和优化相结合的一体化流程&#x…
FPGA仿真--前仿真和后仿真
初学者学习FPGA,必定会被它的各种仿真弄的晕头转向。比如,前仿真、后仿真、功能仿真、时序仿真、行为级仿真、RTL级仿真、综合后仿真、门级仿真、布局布线后仿真等。 Quartus和Modelsim软件的仿真形式 Quartus II有两种仿真形式:1、功能仿真&…
V-REP循迹小车仿真(matlab)
利用MATLAB与VREP做了一个循迹小车的联合仿真,用到了视觉传感器,导入mesh,等一些操作. 文章目录最终效果VREP中的设计Matlab中的设计其他设置最终效果 VREP中的设计
可以参考https://www.jianshu.com/p/eb3f38c0c5fa的前三篇教程,跟着这个教程做完第三篇的设计后,进行以下几步…
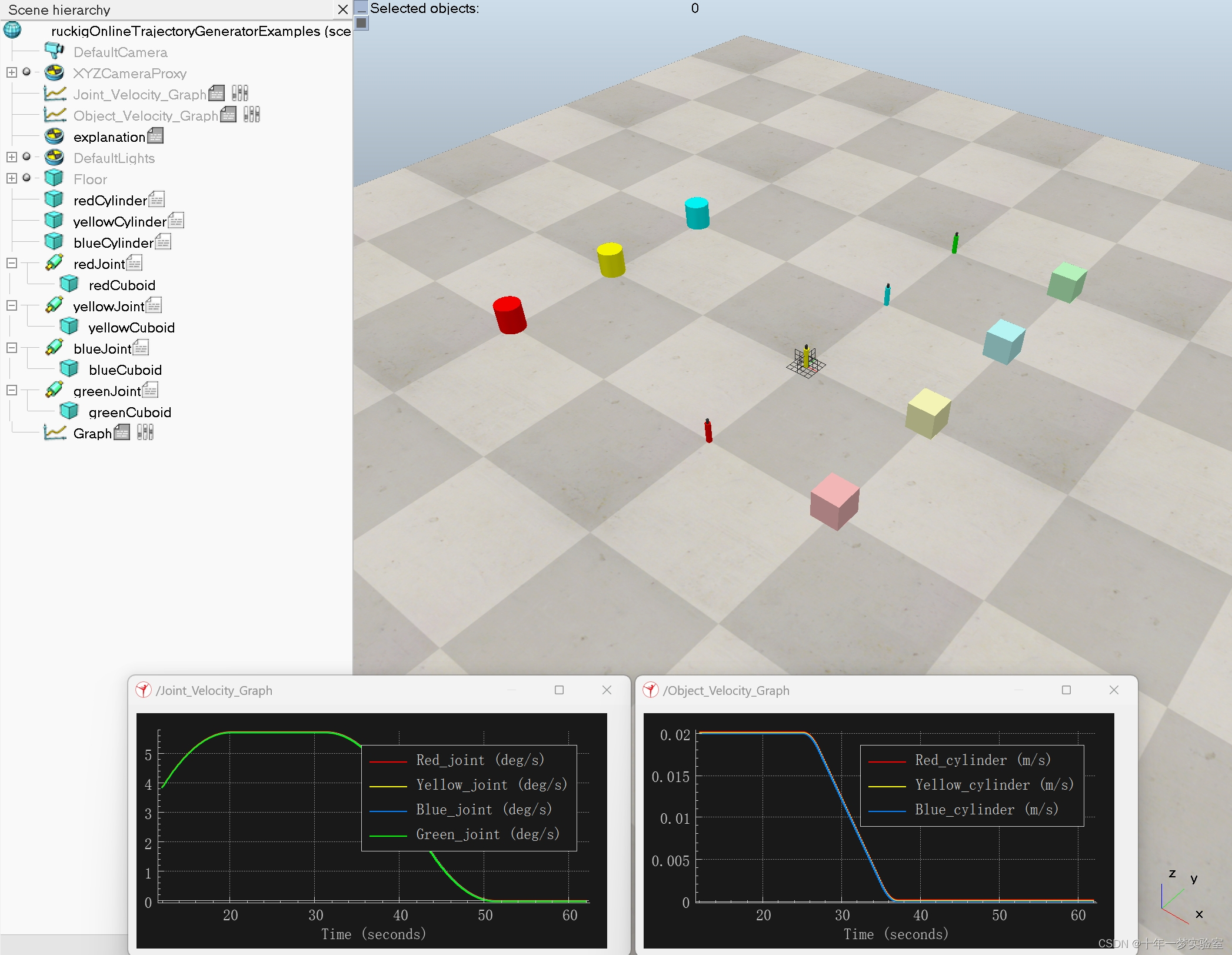
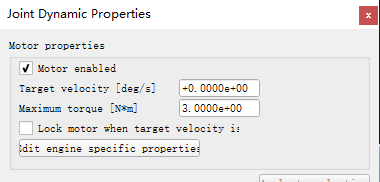
【仿真】ruckig在线轨迹生成器示例
该场景说明了使用 CoppeliaSim 中提供的 Ruckig 在线轨迹生成功能的各种方法:
1. 在线程脚本内使用单个阻塞函数(红色)
2. 在线程脚本中使用多个非阻塞函数(黄色)
3. 在非线程脚本中使用多个非阻塞函数(…

Altair(澳汰尔) Radioss® 评估和优化动态载荷下的高度非线性问题
Altair(澳汰尔) Radioss 评估和优化动态载荷下的高度非线性问题
Radioss 是一款超前的分析解决方案,可评估和优化动态载荷下的高度非线性问题。它广泛应用于全球各行各业,能有效提高复杂设计的耐撞性、安全性和可制造性。
30 多…

线上研讨会 | 应对汽车毫米波雷达设计中的电磁挑战
智能汽车、新能源汽车最近几年一直是汽车行业关注的热点,随着5G技术越来越普及,汽车智能化发展将越来越迅速。从传统汽车到智能汽车,不是简单功能的增强,而是从单一功能的交通工具变成可移动的办公和娱乐空间,成为物联…
Qt+C++自定义控件仪表盘动画仿真
程序示例精选 QtC自定义控件仪表盘动画仿真 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对<<QtC自定义控件仪表盘动画仿真>>编写代码,代码整洁,规则&…
向量形式四阶龙格库塔法的仿真细节
摘要 给出了四阶龙格库塔法(ODE4)的向量形式,推导了二阶积分器串联型系统的ODE4更新公式,解释了在使用ODE4仿真高阶系统和带外部输入系统时的各种注意事项,最后给出四阶龙格库塔法只能使用一次的重要结论。
标量和向量…

如何在谷某地球飞行模拟中导入简单飞机开发的飞机模型
如何在谷某地球飞行模拟中导入简单飞机开发的飞机模型
简飞的飞友们!我并没有弃坑,只不过我不是你们想象的那样设计飞机。我之前写过一篇图文讲解如何在谷某地球里规划飞行航线:
手把手教你驾驶西锐SR-22小飞机在美国大峡谷中穿行https://b…

序列检测器Verilog设计
检测10010的串
timescale 1ns/10ps
module listcheck (rst,clk,in,result);
input rst,clk;
input in;
output result;
reg out;
assign result out;
reg [2:0] current_state,next_state;
parameter [2:0]S0 3b000,S1 3b001,S2 3b010,S3 3b011,S4 3b100,S5 3b101;
//s…
Altair® HyperGraph® 全面的 CAE 后处理和工程数据可视化
Altair HyperGraph 全面的 CAE 后处理和工程数据可视化
HyperGraph 和 Altair HyperView 具有过程自动化功能、报告创建功能和可扩展的用户界面,可提高工程设计效率。
HyperGraph 是一款强大的数据分析和绘图工具,其界面支持多种常用文件格式。其具有直…
V-REP四驱车的仿真
VREP四驱车仿真上个图吧这个车能跑,但存在着问题我没能解决,就是导轮的问题,导轮与车身之间的连接总是有问题.还待解决.上面的GIF是问题没解决时.问题已解决完整工程下载链接:https://download.csdn.net/download/qq_33243369/11238222
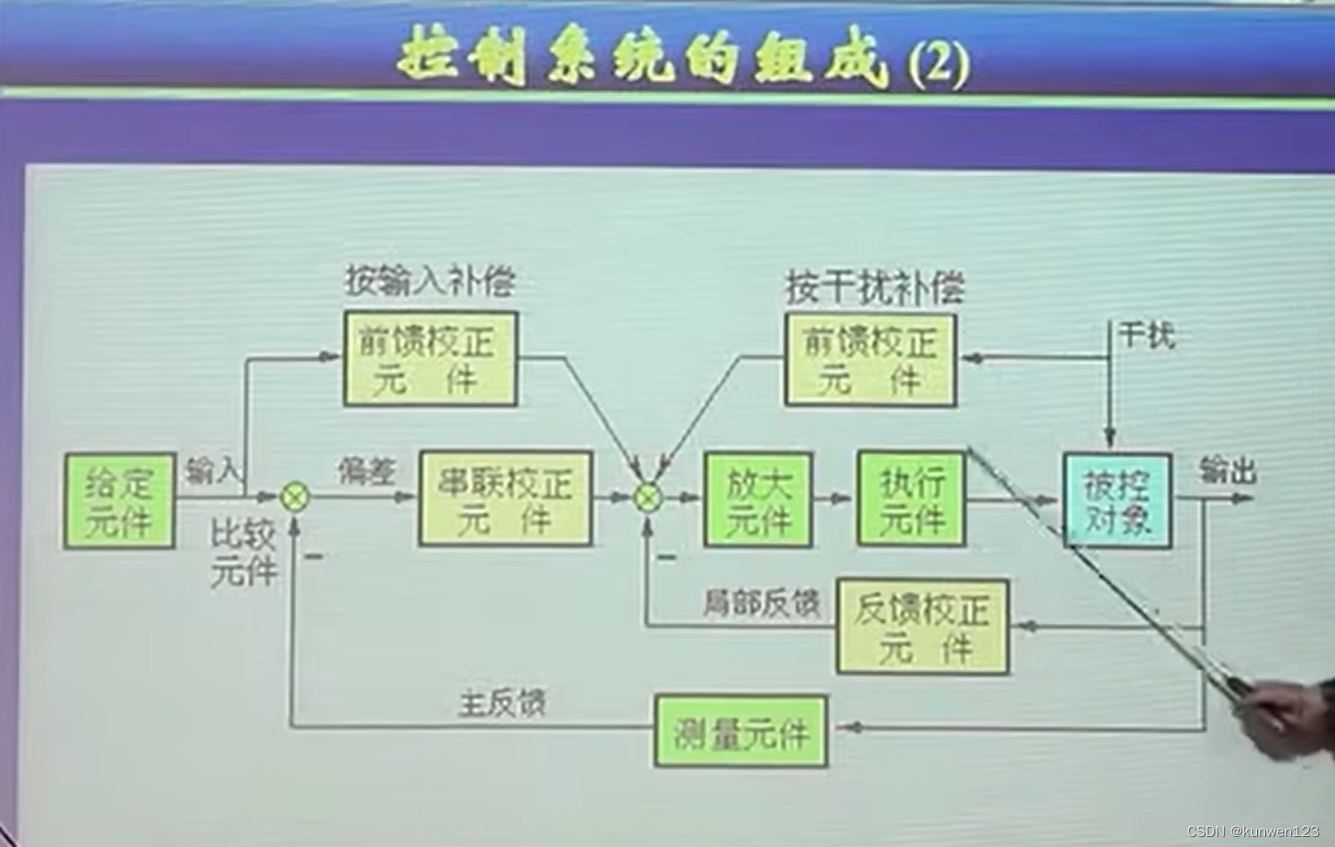
自动控制原理--matlab/simulink建模与仿真
第一讲 自动控制引论 第二讲 线性系统的数学模型 第三讲 控制系统的复域数学模型(传递函数) 第四讲 控制系统的方框图 /video/BV1L7411a7uL/?p35&spm_id_frompageDriver
pandas, csv数据处理 numpy,多维数组的处理 Tensor,PyTorch张量
工作原理图…
keil构建STM32工程并使用proteus仿真led点灯实验
STM32单片机与51单片机有很大区别,不仅结构上有很大差异,STM32更复杂一些,在操作上来说,STM32也要复杂很多,51单片机上手写代码,可以很直接操作引脚,但是STM32单片机在操作引脚之前需要作很多初…

开关与仿真 | 关于如何选择连接器配件
关于连接配件 一旦选定了项目所需的仪器或开关产品,集成商们就需要选择能将各种产品方便地连接起来的一系列连接产品。 连接系统的重要性,在前面的文章中我们已经进行了系统的介绍。正确选择连接产品对于集成商来说是一个很重要的问题,需要花…
modelsim新建工程进行功能仿真
下文通过单独在modelsim中新建工程的方式来进行功能仿真。 打开altera-modelsim软件,界面如下图所示。红框里是各种仿真用到的库,这里由于用的是altera-modelsim,所以altera的器件库等已经自动关联了,如果没有的库则需要手动去添…

Netlist与RTL仿真结果不匹配
Netlist 仿真和RTL比匹配主要是因为Netlist会存在不定态以及传播不定态,导致仿真不正确; 不定态的来源:
大多数设计在上电时不能保证cell的特定的逻辑状态。flip flop或memory根据环境因素,芯片间的工艺差异等可能会有不同的初始…

MATLIB用Box-Muller变换产生高斯白噪声
陈拓 2020/12/10-2020/12/11 在《MATLIB产生高斯白噪声并生成C语言代码》https://zhuanlan.zhihu.com/p/335809620
一文中我们用MATLIB的wgn函数产生了高斯白噪声,在本文中我们用Box-Muller变换产生高斯白噪声。 1. 高斯白噪声
百度百科,高斯白噪声(Wh…
Ubuntu 安装Verilator——翻译自官网
… 威尔逊-斯奈德版权所有 2003-2023。 … SPDX 许可证标识符: 仅限 LGPL-3.0 或 Artistic-2.0
… _安装: 安装 本节讨论如何安装 Verilator。
软件包管理器快速安装
使用发行版的软件包管理器是最简单的入门方法。入门的最简单方法。(请注意…

MATLIB产生高斯白噪声并生成C语言代码
陈拓 2020/12/10-2020/12/10 我要在他处使用C语言产生高斯白噪声,先用MATLIB生成一个能产生高斯白噪声的C程序作为参考。
1. 高斯白噪声
百度百科,高斯白噪声(White Gaussian Noise,WGN):如果一个噪声,它的瞬时值服从…
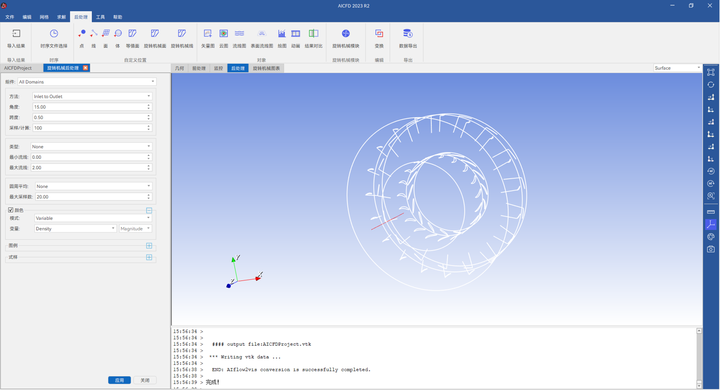
【AICFD案例教程】轴流风扇仿真分析
AICFD是由天洑软件自主研发的通用智能热流体仿真软件,用于高效解决能源动力、船舶海洋、电子设备和车辆运载等领域复杂的流动和传热问题。软件涵盖了从建模、仿真到结果处理完整仿真分析流程,帮助工业企业建立设计、仿真和优化相结合的一体化流程&#x…
基于Matlab的山区监视场景建模仿真(附源码)
此示例演示如何对山区的监视场景进行建模,在该区域,地形可能会遮挡监视雷达的地面和飞行器。可以使用数字地形高程数据 (DTED) 文件中的地理参考地形数据定义追踪方案,创建遵循地形的轨迹,模拟该方案&#…

声学仿真分析工具Acoustics 在Workbench中这样学
声学仿真分析工具Acoustics 在Workbench中这样学付亚兰 讲师2年前浏览11376关注声学有限元仿真 主要用于模拟声压波在声介质中的生成、传播、辐射、吸收和反射。随着有限元软件的发展和人们对噪声问题的重视,声学有限元仿真在越来越多的行业得到广泛应用。比如&…
【TB作品】MSP430,波形发生器,单片机,Proteus仿真
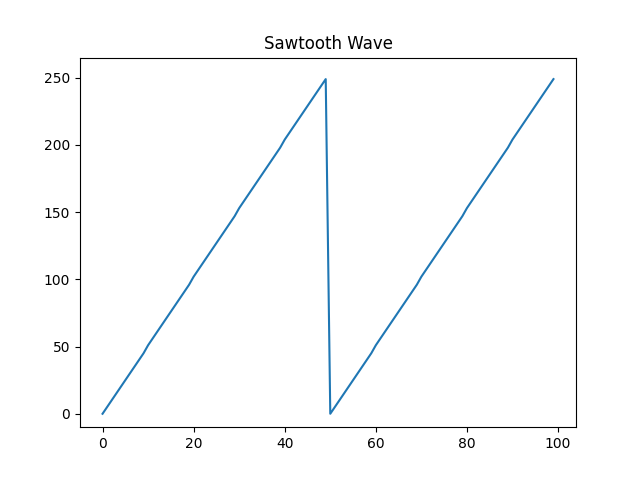
文章目录 题目效果梯形波100个点产生方法锯齿波100个点产生方法c代码和proteus仿真 题目
114 波形发生器的制作 设计要求 设计一个能产生正弦波、方波、三角波、梯形波、锯齿波的波形发生器。设置5个开关K1~K5(从 上到下),分别对应正弦波、方波、三角波、梯形波、锯齿波,按一下…

【AICFD案例教程】水冷板散热分析
AICFD是由天洑软件自主研发的通用智能热流体仿真软件,用于高效解决能源动力、船舶海洋、电子设备和车辆运载等领域复杂的流动和传热问题。软件涵盖了从建模、仿真到结果处理完整仿真分析流程,帮助工业企业建立设计、仿真和优化相结合的一体化流程&#x…

questasim的傻瓜式安装与仿真教程
一、安装 1、下载软件 链接:https://pan.baidu.com/s/1S05AnO_w-wy6RsAj_kdUXg 提取码:p2nt 2、根据电脑类型是32位还是64位,解压不同安装包。 解压得:
2、运行.exe文件,出现: 问题及解决办法ÿ…
livox 半固体激光雷达 gazebo 仿真 | 安装与验证
livox 半固体激光雷达 gazebo 仿真 | 安装与验证 livox 半固体激光雷达 gazebo 仿真 | 安装与验证livox 介绍安装验证 livox 半固体激光雷达 gazebo 仿真 | 安装与验证
livox 介绍
览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业…
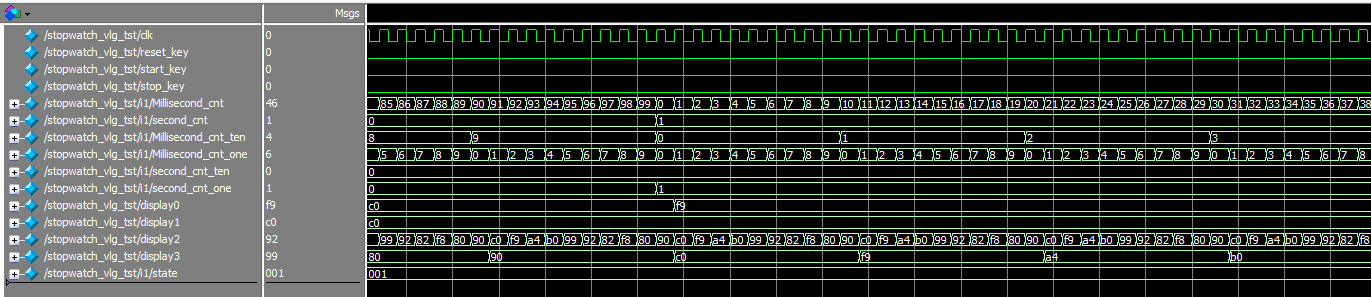
简单秒表设计仿真verilog跑表,源码/视频
名称:简单秒表设计仿真
软件:Quartus
语言:Verilog
代码功能:
秒表显示最低计时为10ms,最大为59:99,超出返回00:00
具有复位、启动、暂停三个按键
四个数码管分别显示4个时间数字。
演示…

光学仿真|优化汽车内部照明体验
当我们谈论优化人类感知的内部照明时,我们实际上指的是两个重点领域:安全性和驾驶员体验。如果内部照明可以提供尽可能最佳的体验,驾驶员则能够更好地应对颇具挑战性或意外的驾驶状况,并且减轻疲劳感。除了功能优势外,…
libcoppeliaSim.so.1: undefined symbol: _ZdlPvm, version Qt_5
https://github.com/stepjam/PyRep/issues/320#issuecomment-1228699607

VCS基本选项命令介绍
一:如何执行(编译执行) 1:编译链接生成二进制可执行文件 $vcs source_file[compile_time_options], 例如 vcs v2k filename.v -debug_all (2k指2001版本) compile_time_options 可选项 A:基本可选项 -Mupdate :增量编译&am…
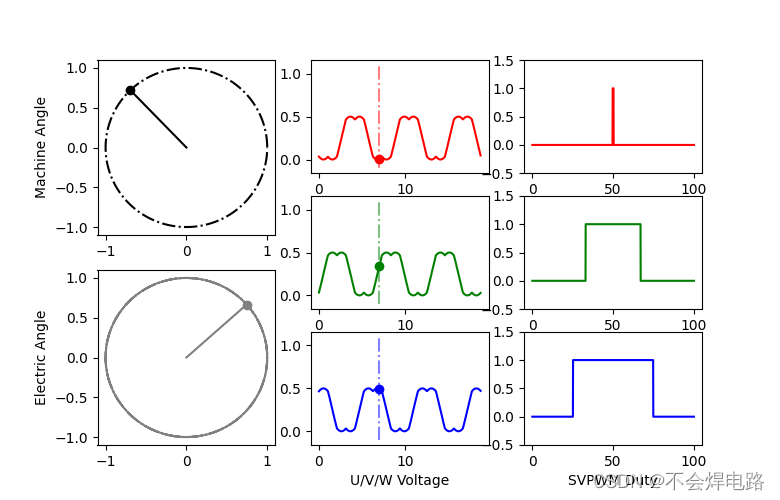
SVPWM马鞍波形仿真(python)
SVPWM波的原理不再过多介绍。
最近在学习SVPWM,仿真了一下马鞍波。
python源码贡献出来。 import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as anim#############################################
# 我们的目的是根据机械角度&…

如何安装并使用STM32 cube IDE (windows)
1.官网下载:下载链接 点击获取软件,填写基本信息,邮箱要填正确的,然后STM会把下载链接通过邮件发送给你 2.解压下载的exe安装包,点击解压后的文件进行安装 安装完成后打开该IDE,并选择型号 这里以STM32F407…

Quartus II 13.0第一次使用和仿真(VHDL)
Quartus II仿真软件使用1. 创建文件2. 创建项目3. 编译一下4. 仿真创建5. 添加引脚6. 设置时间7. 编译运行8. 小BUG当前使用VHDL语言进行代码编写 1. 创建文件 代码编写:(一位加法器) Ctrls保存文件 注意文件名和实体一致起来 2. 创建项目 Next->Next->…-&g…
Arduino与Proteus仿真-WiFi TCP客户端数据通信
TCP客户端数据通信 文章目录 TCP客户端数据通信1、软件准备2、硬件准备3、仿真电路原理图4、仿真代码实现5、仿真结果本文将介绍Arduino在Protues仿真环境中作为TCP客户端,如何与TCP服务器进行数据通信。 1、软件准备
1)Arduino IDE或 VSCode + PlatformIO
2)Proteus电路仿…
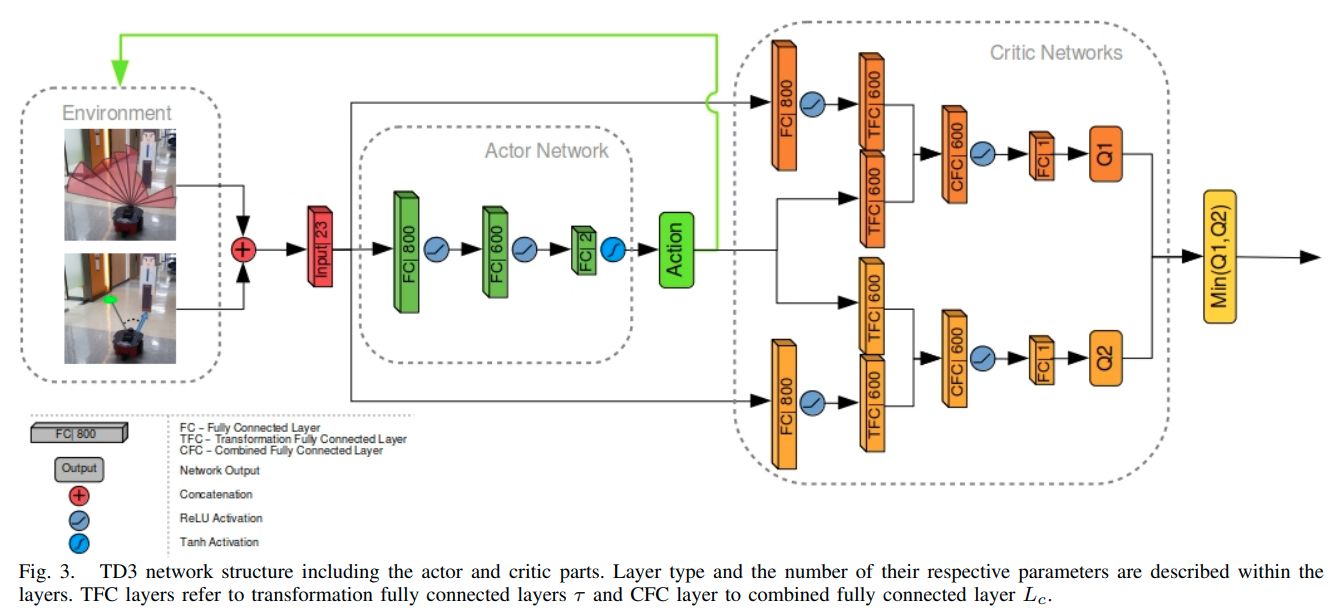
Gazebo仿真环境下的强化学习实现
Gazebo仿真环境下的强化学习实现
主体源码参照《Goal-Driven Autonomous Exploration Through Deep Reinforcement Learning》 文章目录 Gazebo仿真环境下的强化学习实现1. 源码拉取2. 强化学习实现2.1 环境2.2 动作空间2.3 状态空间2.4 奖励空间2.5 TD3训练 3. 总结 1. 源码…

开源的高斯光束变换软件GaussBeam
文章目录 下载和界面光学元件功能区 下载和界面
顾名思义,GaussianBeam是一款模拟高斯光束传输的开源软件,功能十分简单,下载地址:GaussianBeam,安装过程无坑点。
打开软件,界面如下,十分直观…
电路设计(10)——超温报警电路的proteus仿真
1.题目背景 在现实生活中,常有一种工程技术,即带有自动温度补偿的设备,能在规定温度内正常工作。但是为了设备安全,需设定工作的上限温度,万一温控补偿失效,设备温度一旦超出上限温度时,便立即切…
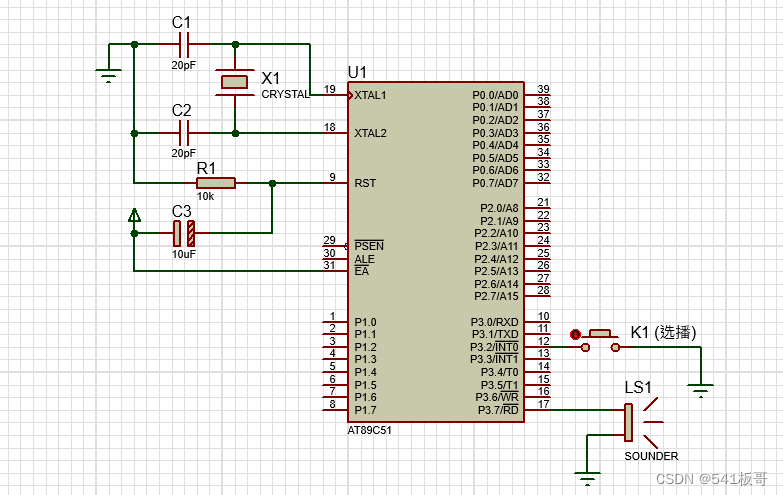
Proteus仿真--基于51单片机的按键选播电子音乐(仿真文件+程序)
本文主要介绍基于51单片机的按键选播电子音乐(完整仿真源文件及代码见文末链接)
本设计中包括一个按键和一个喇叭,点击按键可以切换选择播放不同的音乐
仿真图如下
其中点击按键K1进行音乐选播选择切换
仿真运行视频 Proteus仿真--基于5…

Gazebo GPU加速【gzserver running in GPU】
文章目录 Gazebo GPU加速1. 问题2. 解决办法2.1 本机运行 2.2 headless3. 补充3.1 如何确定的Gazebo为OpenGL渲染3.2 显卡驱动--no-opengl-files3.3 nouveau Gazebo GPU加速
1. 问题
Gazebo仿真帧率极低,fps在10以下,同时显卡驱动已安装,但…

PLECS中DLL模块的使用
之前发布了一篇文章,介绍如何使用PSIM中的DLL模块。而本篇文章的内容与之类似,不过主角换成了PLECS。
PLECS和PSIM类似,也属于电力电子仿真软件,使用方便,仿真速度快,和Matlab也有一定的联系,有…

Multisim入门(一):
测量节点电压
直接add需要测的节点电压就可以了,电流和功率同理 瞬态分析(Transient)
观察电路的某一个量随时间的变化,比如RC电路,注意选择user define
参数扫描
可以改变参数,得到不同的输出结果 交流分析&a…

阿木实验室普罗米修斯项目环境配置
引言
普罗米修斯项目其实只是个大ROS功能包, 里面每个模块就是每个ROS功能包,比如控制模块,视觉模块等等。对PX4配置的与这个一样,另外他是使用自己的P系列无人机(我个人是P450),所…
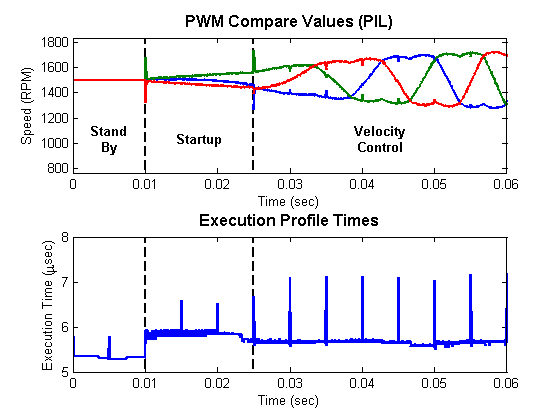
永磁同步电机的磁场定向控制
目录
概述
通过系统仿真验证行为
探索模型架构
生成用于集成到嵌入式应用程序的控制器 C 代码
指定控制器模型的参考行为
创建 PIL 实现
准备用于 PIL 测试的控制器模型
测试生成的代码的行为和执行时间
结论 此示例说明从电机控制算法生成 C 代码并验证其编译行为和执…

Vega Prime入门教程12.01:运行测试
本文首发于:Vega Prime入门教程12.01:运行测试
本文主要目的:
安装是否成功成功运行是什么效果
安装完成后,在桌面会有软件快捷方式 双击打开,默认界面为 打开工具栏运行按钮 此时会弹出一个命令行界面
如果证书无…

SIMULIA--Abaqus结构仿真篇
什么是 SIMULIA? 基于3DEXPERIENCE平台的品牌
多学科多领域的协同仿真与分析优化
三大核心仿真领域:电磁仿真 流体仿真 结构仿真 SIMULIA结构仿真是什么? 对结构进行力学、热学、声学等多学科计算,辅助于设计方案优化.采用数字化技术模拟产品性能&am…

1_simulink简单入门_simulink仿真PID控制
1_simulink简单入门_simulink仿真PID控制 2_simulink搭建RCL_电阻电感电容模块 毕业前想去做物联网还是或者linux,结果玩了一年多的电机控制,早就深知matlab/simulink绕不过的,拖到现在,下班晚上再把大学自控做实验用的matlab捡起…
2_simulink搭建RCL_电阻电感电容模块
1_simulink简单入门_simulink仿真PID控制 2_simulink搭建RCL_电阻电感电容模块 基本元件 电阻 - 单位: 欧姆 Ω\varOmegaΩ 电压方程: uiRuiRuiR 电流方程: iuRi\frac{u}{R}iRu 电容 - 单位: 法拉 F\rm{F}F 电压方程: u1C∫0tidtu\frac{1}{C}\int_0^t{idt}uC1∫0tidt 电…
Python探索Raspberry Pi机器人平台
随机轨迹
第一代机器人吸尘器在一个无限循环中使用了一种非常简单的算法:
直行直到撞到障碍物转一个随机角度
如果您担心这种行为的清洁质量,那可能是对的。 但是从数学角度来看,如果给定无限的时间,只要机器人可以物理上到达&…
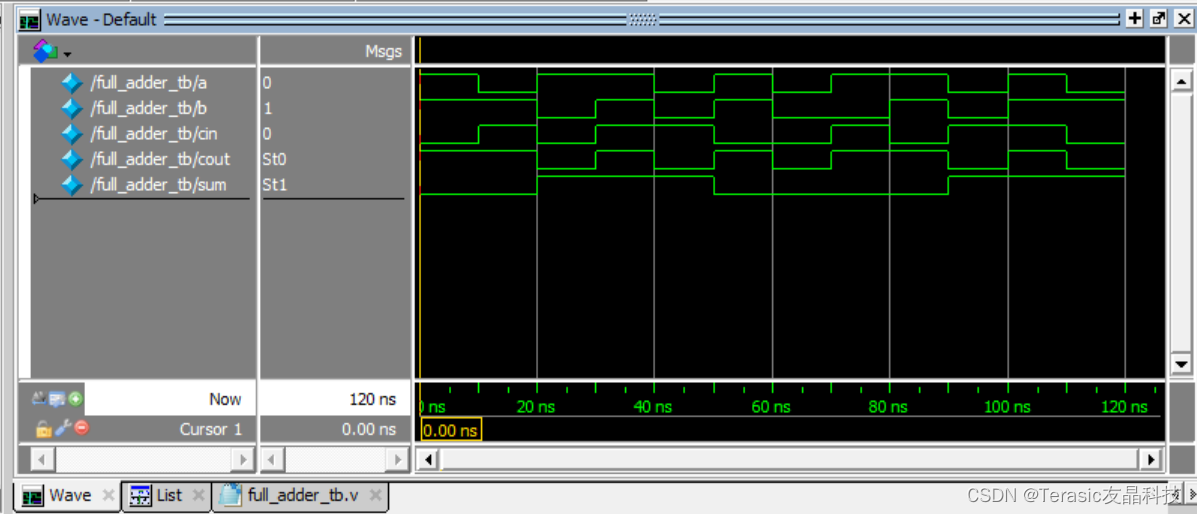
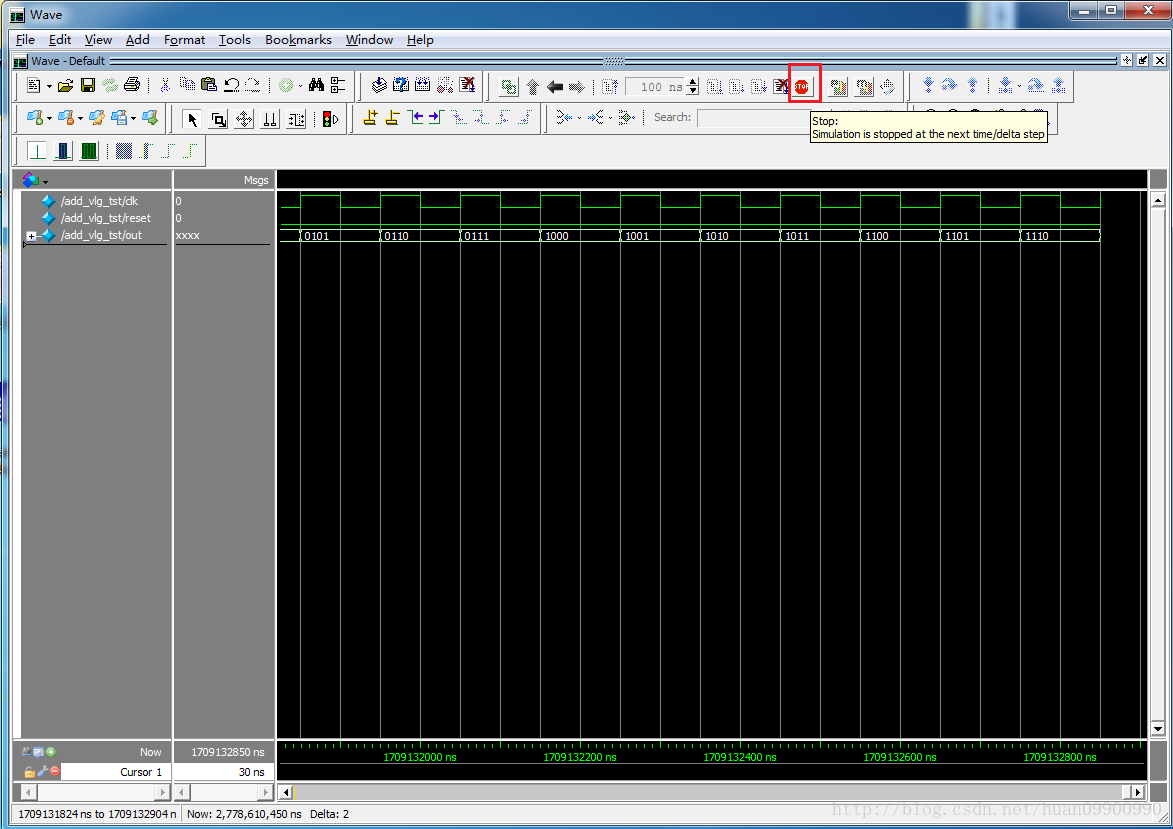
University Program VWF仿真步骤__全加器
本教程将以全加器为例,选择DE2-115开发板的Cyclone IV EP4CE115F29C7 FPGA,使用Quartus Lite v18.1,循序渐进的介绍如何创建Quartus工程,并使用Quartus Prime软件的University Program VWF工具创建波形文件,对全加器的…

Altair Compose® 数学运算、编程、数据分析及可视化
Altair Compose 数学运算、编程、数据分析及可视化
分析数据、开发算法或创建模型 - Altair Compose 旨在将你的想法付诸实施。
Altair Compose 是一个用于数学计算、数据操作和可视化、编程和调试脚本的环境,对重复运算和流程自动化非常有用。Altair Compose 让用…
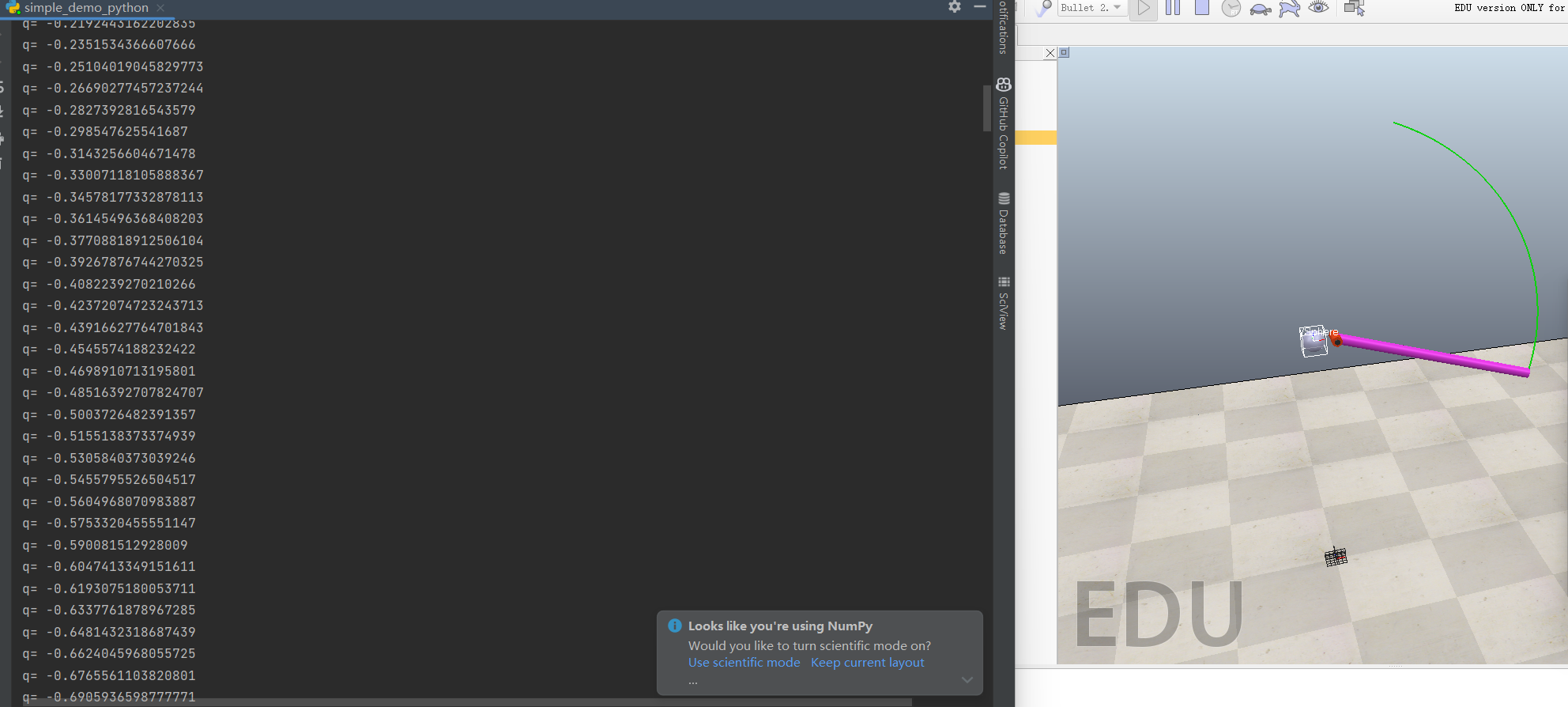
Coppeliasim倒立摆demo
首先需要将使用Python远程控制的文件导入到文件夹,核心是深蓝色的三个文件。 本版本为4.70,其文件所在位置如下图所示,需要注意的是,目前不支持Ubuntu22的远程api: 双击Sphere这一行的灰色文件,可以看到远程…
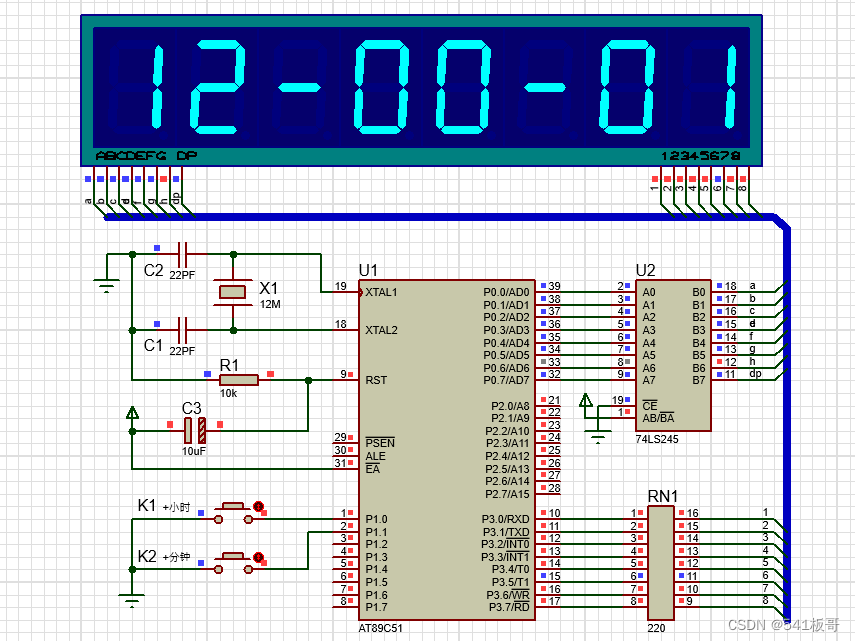
Proteus仿真--基于数码管设计的可调式电子钟
本文主要介绍基于51单片机的数码管设计的可调式电子钟实验(完整仿真源文件及代码见文末链接)
仿真图如下
其中数码管主要显示电子钟时间信息,按键用于调节时间
仿真运行视频 Proteus仿真--数码管设计的可调式电子钟(仿真文件程…
自动驾驶学习笔记(二)——Apollo入门
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
Ubuntu
Linux文件系统
Linux指令…

自动驾驶学习笔记(三)——场景设计
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门
文章目录 前言
场景设计平台
场景地图
场景基本…
基于Matlab的汽车安全应用轨道融合仿真(附源码)
此示例演示如何融合两辆车的履带,以提供比每辆车更全面的环境估计。该示例演示如何使用轨道级融合器和对象轨道数据格式。在此示例中,将使用“自动驾驶工具箱”中的驾驶场景和视觉检测生成器、“雷达工具箱”中的雷达数据生成器以及“传感器融合和™跟踪…

Vega Prime入门教程14.04:CDB测试
本文首发于:Vega Prime入门教程14.04:CDB测试
打开失败
打开vpcdb_yemen_urban.acf
会报错 点击确定后会显示默认界面 这个白天蓝海应该是默认场景。
开启服务
打开LP,点击菜单栏或者工具栏 显示管理界面 切换至rtp界面 点击Start RTP按…
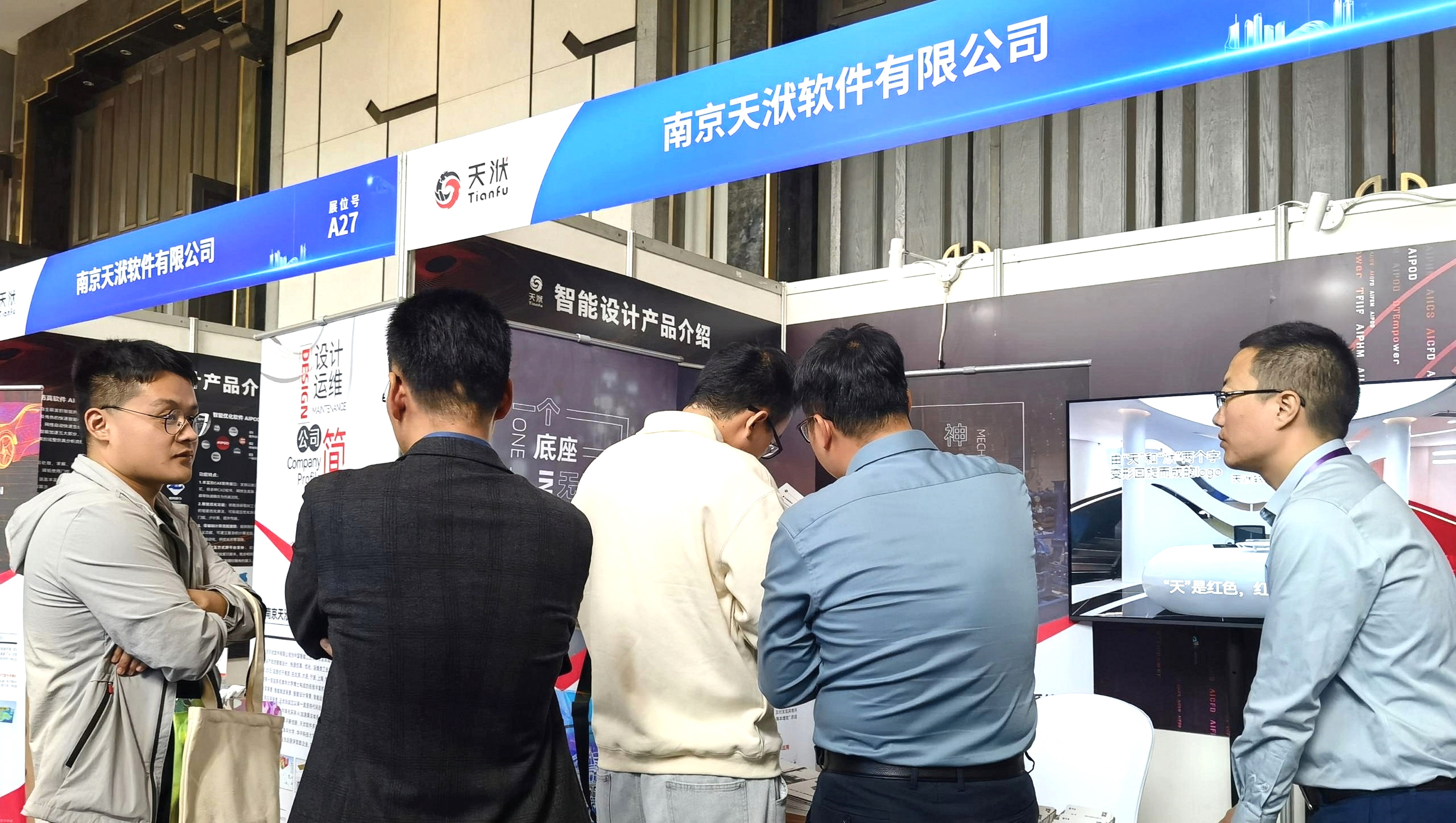
天洑参展第三十五届中国仿真大会
2023年10月14日,由安徽省政府、中国仿真学会主办的第三十五届中国仿真大会在安徽合肥召开。中国仿真大会自1989年起每年举办一次,是国内仿真领域规模最大、综合性和影响力最强的大型综合性学术会议。本届学术会以“数字经济、仿真发展”为主题࿰…
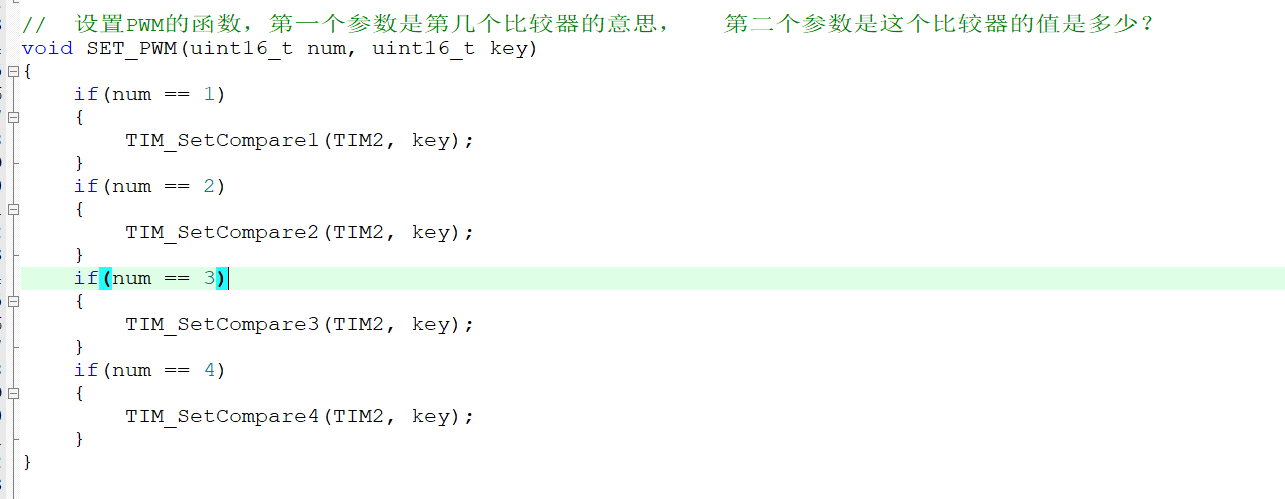
STM32利用标准库编写同时输出4路PWM信号的程序(Proteus)仿真
先看看结果: 这个是根据上午发的文章的基础上更改的,很简单,只是用了一个定时器,初始化了4个比较器而已,就可以单独的控制每一路PWM的占空比了,好了,把源文件展示一下,完事去接孩子放…
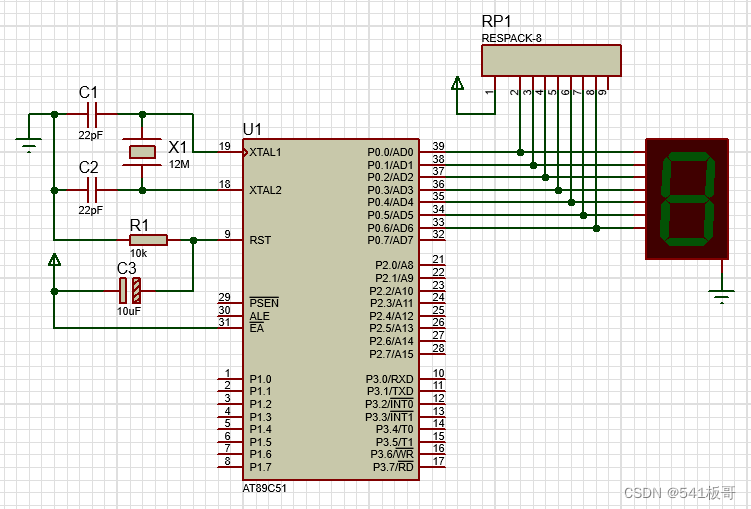
汇编实现LED循环点亮(延时子程序模板)
在单片机P2口外接8个发光二极管(低电平驱动)。试编写一个汇编程序,实现LED循环点亮功能:P2.0-P2.1-P2.2-P2.3-…-P2.7-P2.6-P25-…-P2.0的顺序,无限循环。要求采用软件延时方式控制闪烁时间间隔(约50ms)。
首先进行电路设计
电路原理图设计
利用 Prot…

汇编仿真 — 比较大小
项目文件
文件
关于项目的内容知识点可以见专栏单片机原理及应用 的第三章 汇编 题目:编程实现如下功能:比较片内 RAM的30H和40H单元中两个无符号数的大小,并将大数存入50H,小数存入51H,若两数相等,则使位单元7FH置1…
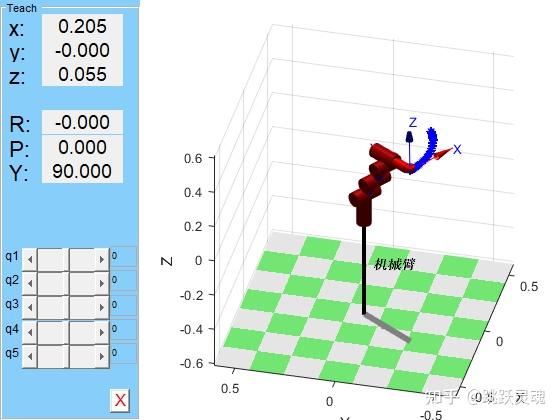
article-六轴机械臂(带抓手)运动学分析+轨迹规划
1正运动学分析
采用标准的D-h法进行机械腿模型分析: D-h表如下 (2)通过(1)求解出机器人各位姿变换矩阵后,求解机器人手臂变换矩阵
** **
。通过matlab 计算,写出机器人末端位置。
正运动学分…

自动驾驶学习笔记(一)——Apollo平台
#Apollo开发者社区#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
Apollo框架
开发平台
总结 前…

Vega Prime入门教程12.02:基本开发流程
本文首发于:Vega Prime入门教程12.02:基本开发流程
API
Vega Prime的API通过模板和继承性的使用使得仿真循环更加简洁而有效,基于STL(标准模板库)和C的API显得非常紧凑和灵活。
实时控制包括定义ACF、配置ACF和系统…

基于CloudSim Plus的计算卸载仿真设计
基于CloudSim Plus的计算卸载仿真设计
1. 前提介绍
仿真框架的实现,主要依托于仿真实体、以及仿真事件,简单介绍如下
1.1 仿真实体 继承CloudSimEntity类(推荐)或者实现SimEntity接口(不建议) public class ExampleEntity extends CloudSimEntity {pu…

Altair CFD™ 无比宽广的 CFD 仿真解决方案范围
Altair CFD 提供了一套全面的工具来解决流体力学问题。无论您是要对建筑物进行热分析、预测车辆空气动力学、优化齿轮箱加油、降低冷却风扇噪音还是开发创新医疗设备,Altair CFD 都可以提供帮助。
提供多种方法,包括:
用于热和通用应用的通…
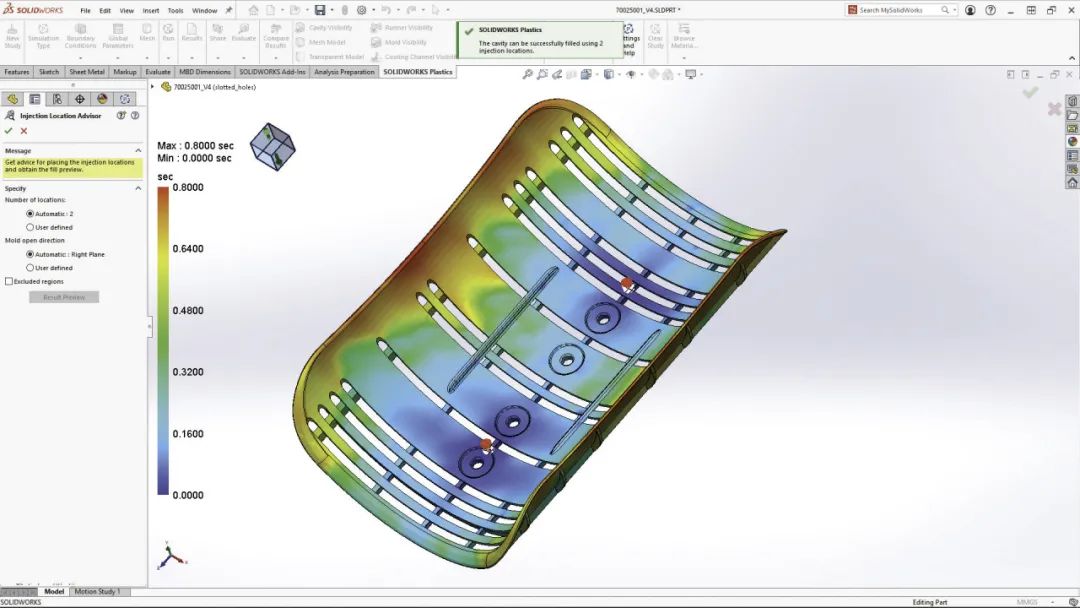
SOLIDWORKS 2024新功能-- 仿真篇
增强型轴承接头 优点 使用功能强大的接口,更轻松、更准确地设置模拟过程,并加快模拟速度。
•通过指定压缩、拉伸和弯曲的刚度,轻松创建自定义轴承接头。
•通过向非线性和大型位移算例添加自定义条件,提高模拟精度。
网格性能…
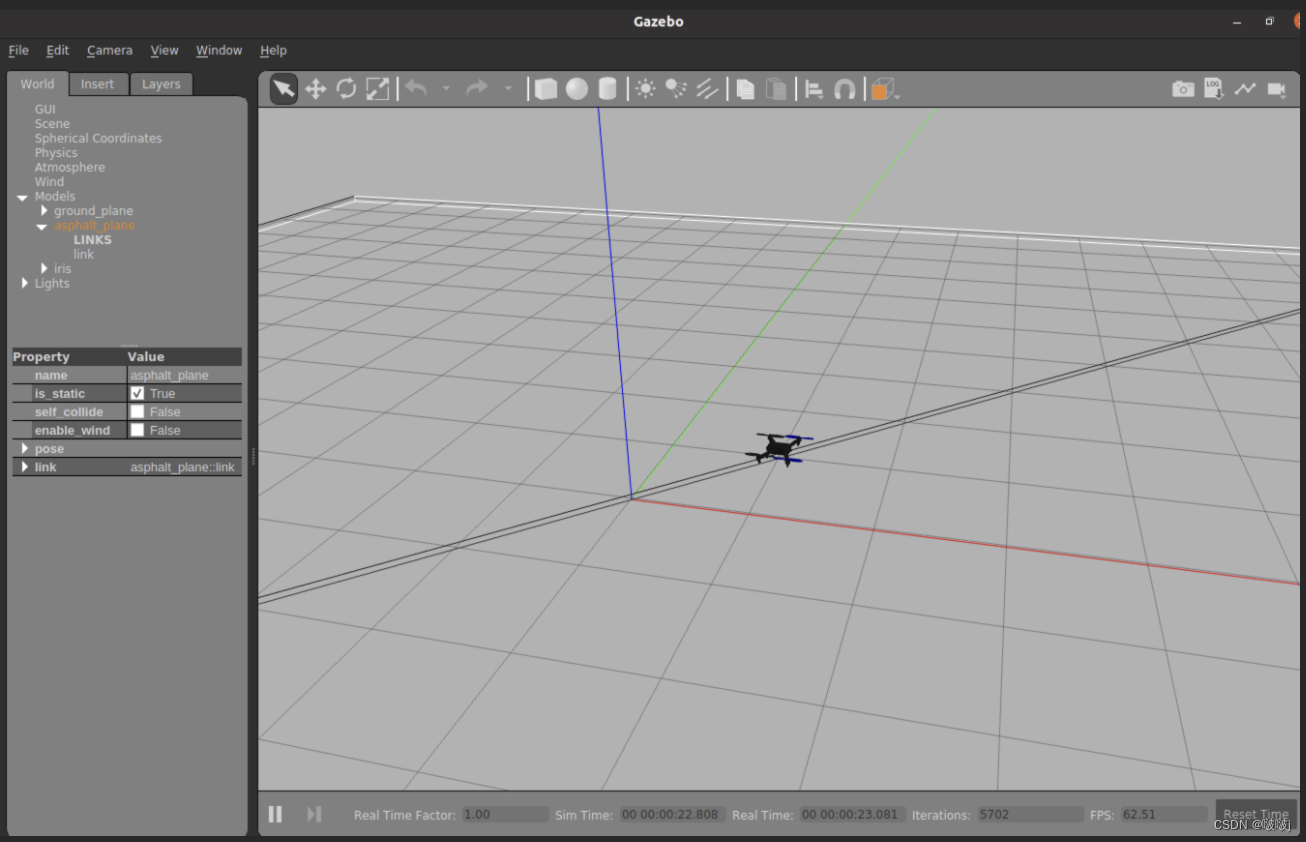
基于 parallels ubuntu 20.04 LTS (focal) 的ros+px4+gazebo 安装
系统环境:
主机环境macos 14.2.1 (23C71)、M1芯片Paralles商业版 19.1.0 (54729)ubuntuubuntu 20.04 LTS (focal)PX4v1.14.0ROS2foxy
虚拟机安装
1. 下载安装 parallels,参考评论;
2. 下载 ubuntu 镜像,使用 ubuntu 20.04 LT…

games103——作业1
实验一主要实现简单的刚体动画模拟(一只兔子),包括 impulse 的碰撞检测与响应,以及 Shape Matching方法。 完整项目已上传至github。 文章目录简单刚体模拟(不考虑碰撞)平移运动旋转运动粒子碰撞检测与响应碰撞检测碰撞响应Penalty MethodsQuadratic Pen…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
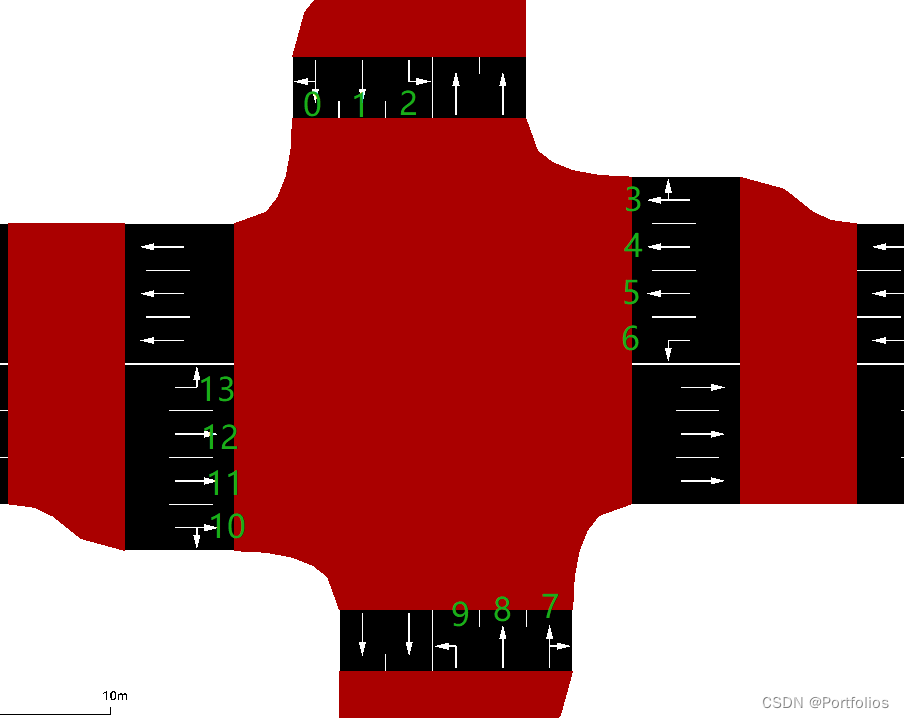
Sumo中Traci.trafficlight详解(上)
Sumo中Traci.trafficlight详解(上)
记录慢慢学习traci的每一天,希望也能帮到你 文章目录 Sumo中Traci.trafficlight详解(上)Traci.trafficlight信号灯参数讲解1.getAllProgramLogics(self,tlsID)2.getBlockingVehicle…
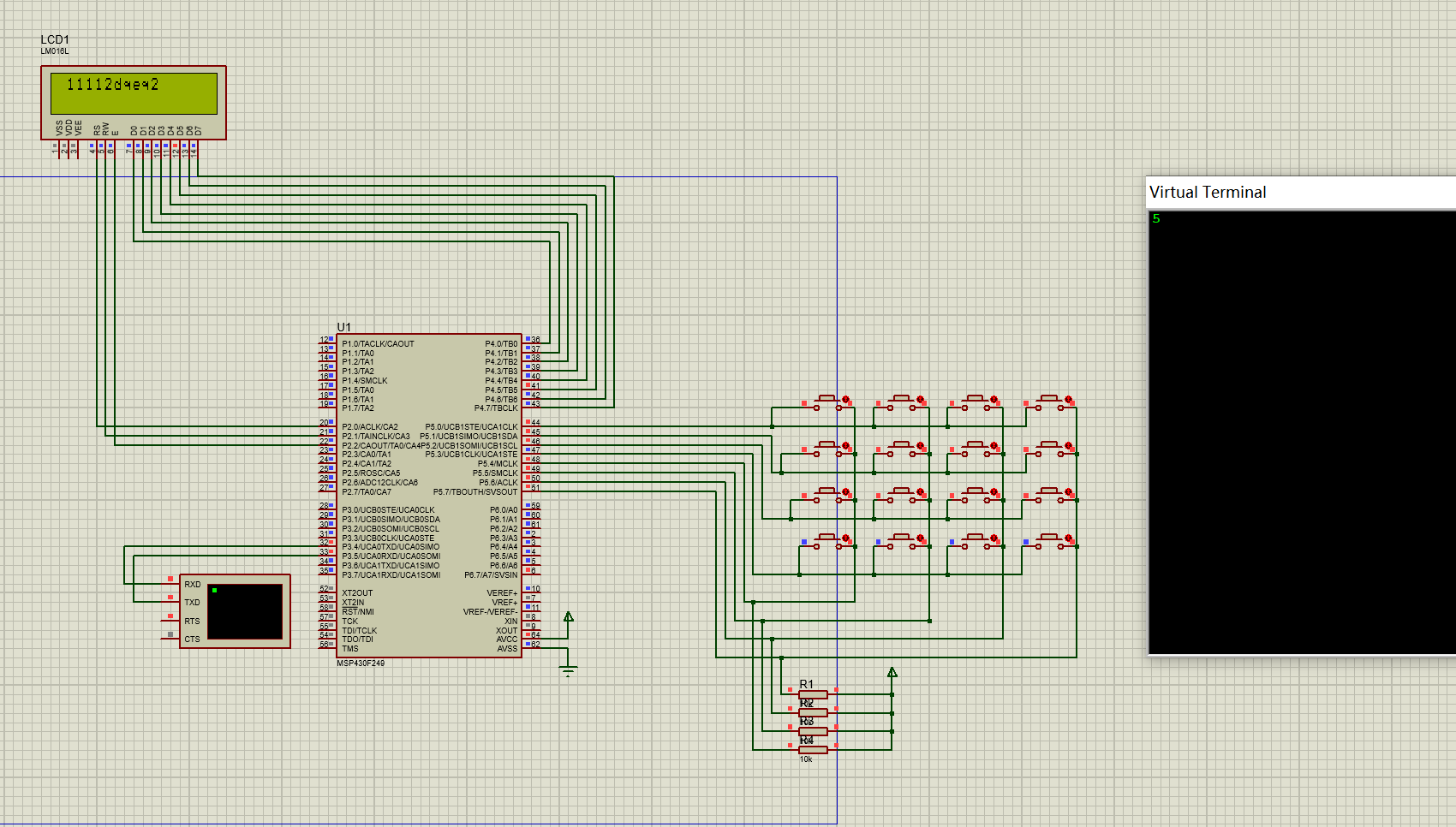
【TB作品】430单片机,单片机串口多功能通信,Proteus仿真
文章目录 题目功能仿真图程序介绍代码、仿真、原理图、PCB 题目
60、单片机串口多功能通信 基本要求: 设计一串口通信程序,波特率38400,通过RS232与PC机通信。 自动循环发送数据串(设计在程序中) 接收并存储和显示该数据串 在发送端定义10个ASCII码键0-9 按键发送单字节,PC机接…
modelsim 常用快捷键
1、鼠标操作: Ctrl鼠标左键从左上向右下拖拉:放大(选中区域) Ctrl鼠标左键从左下向右上拖拉:缩小 2、键盘操作: c :当前光标居中并放大 i,I, :(Zoom in)放大 o,O,-:…

阵列信号处理笔记(3):阵列调向、栅瓣、半功率波束带宽、端射阵列
阵列信号处理笔记 文章目录 阵列信号处理笔记阵列调向栅瓣调向对方向图的影响调向对HPBW的影响工程相关MATLAB代码阵列调向u域平移的动图 θ \theta θ域调向, θ 0 ∘ \theta 0^{\circ} θ0∘、 θ 6 0 ∘ \theta 60^{\circ} θ60∘、 θ 13 5 ∘ \theta 135^{\…
51单片机项目(13)——基于51单片机的智能台灯protues仿真
本次设计,使用protues软件进行仿真,详情如下:
1.输入部分:由热释电红外传感器、光敏传感器、超声波测距传感器所构成的子电路组成。
2.输出模块:由1602液晶显示及其蜂鸣器报警系统组成。
3.中央处理器:主要有AT89C52单片机构成。
4.工作过…
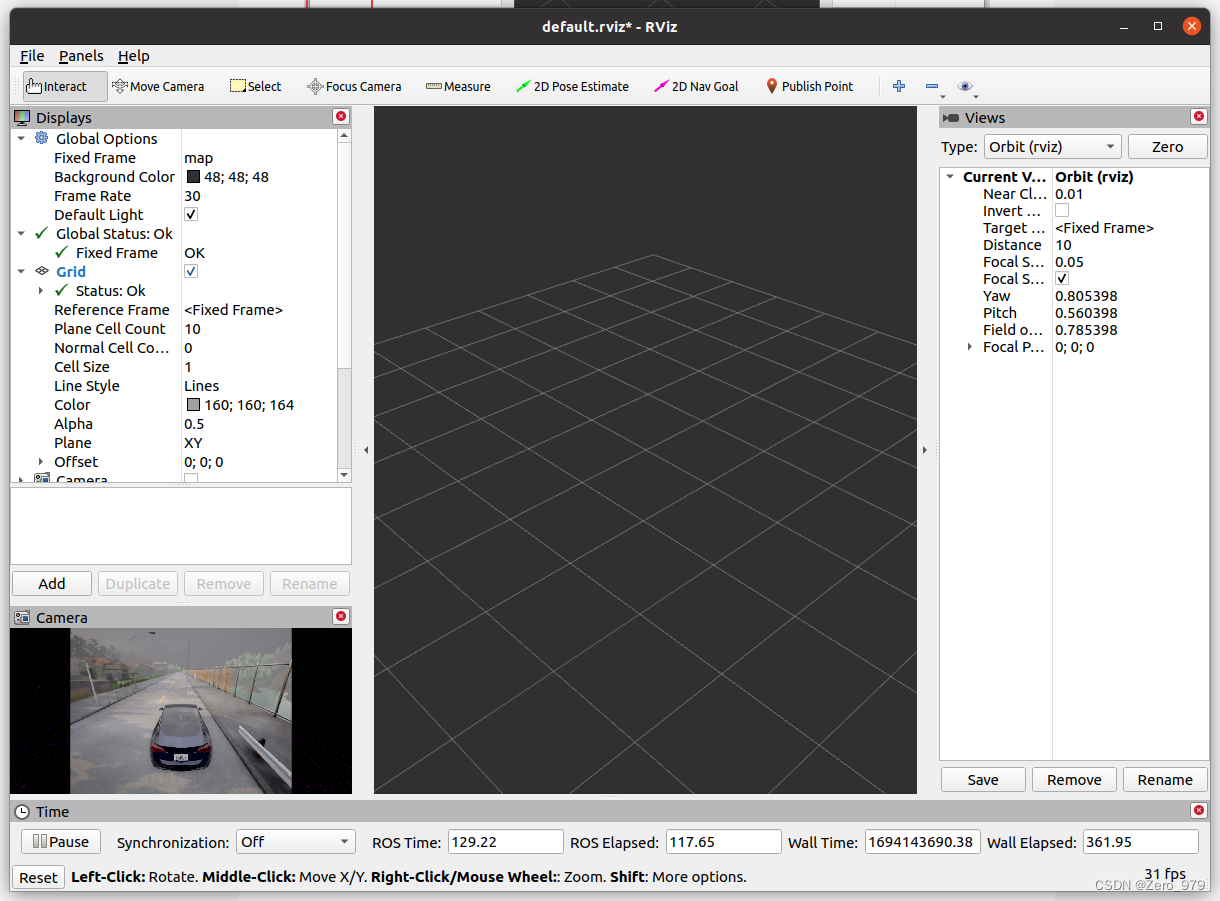
Carla学习笔记(二)服务器跑carla,本地运行carla-ros-bridge并用rviz显示
一、服务器跑carla
详见Carla学习笔记(一)服务器跑carla本地显示窗口_Zero_979的博客-CSDN博客
只需要启动服务器端就行:
./CarlaUE4.sh -carla-rpc-port2000 -RenderOffScreen -graphicsadaper1
二、本地下载 carla-ros-bridge
官方库&…
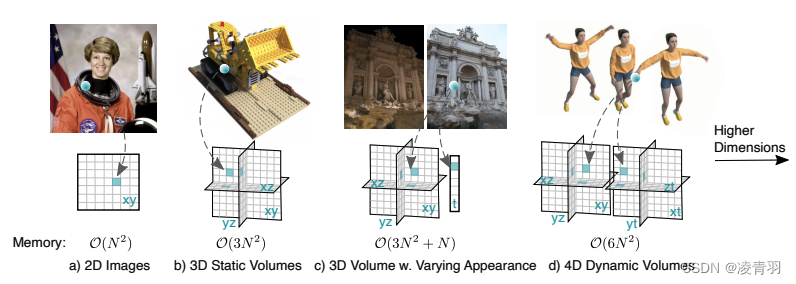
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
● MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving(基于神经辐射场的自动驾驶仿真器) ● https://github.com/OPEN-AIR-SUN/mars ● https://arxiv.org/pdf/2307.15058.pdf ● https://mp.weixin.qq.com/s/6Ion_DZGJ…
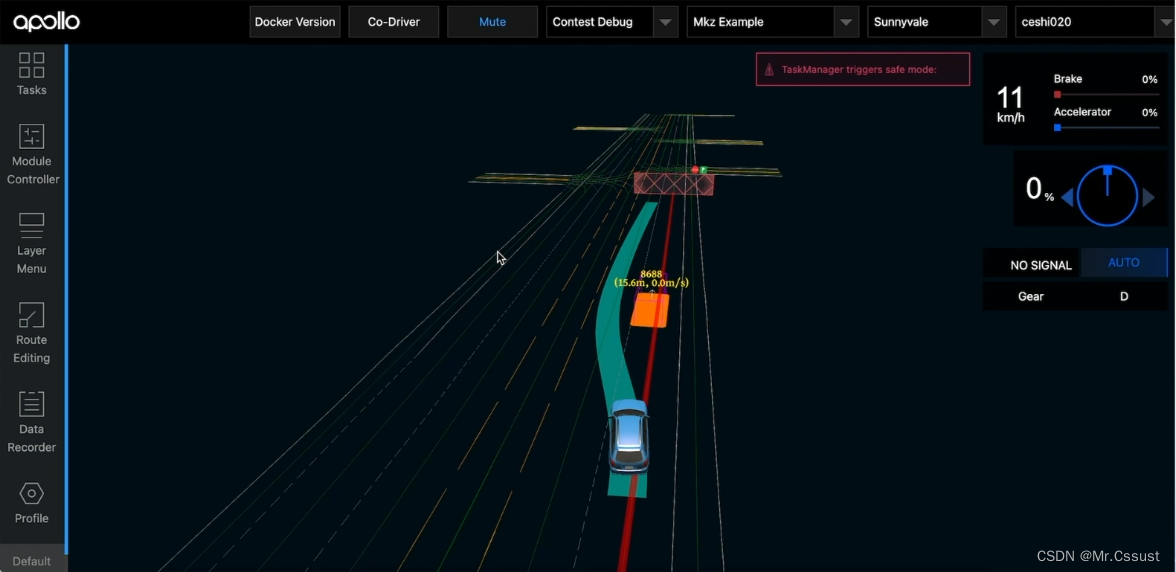
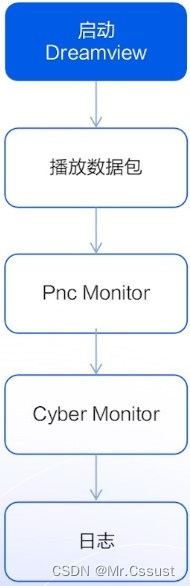
自动驾驶学习笔记(四)——变道绕行仿真
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
仿真内容
启动Dreamview
开启Sim…
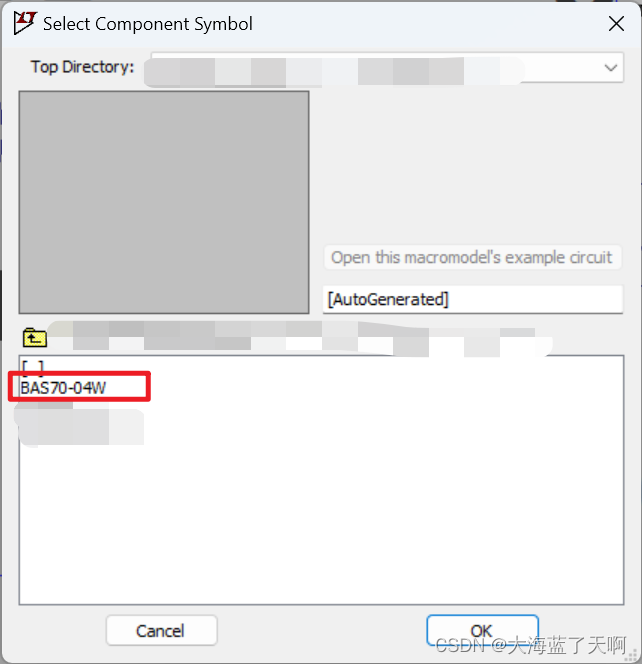
【LTSpice】导入第三方元件库 之 subckt文件类型
LTSpice想要导入第三方的元件库,网上教程非常多。这里记录一下一种不用include命令实现、以后可以直接在component里面添加的 subckt文件的导入。过程比较复杂。
本文只讲解subckt文件!如果发现文件里有.SUBCKT这样的文字,说明可以用本文的方…
Arduino与Proteus仿真-WiFi网络仿真环境搭建
Arduino与Proteus网络(WiFi)仿真环境搭建 文章目录 Arduino与Proteus网络(WiFi)仿真环境搭建1、软件准备2、硬件准备3、仿真电路原理图4、仿真代码实现5、仿真结果本文将详细介绍如何在Proteus搭建Arduino的WiFi仿真环境。 1、软件准备
1)Arduino IDE或 VSCode + PlatformIO …

在飞机设计中的仿真技术
仿真技术在飞机设计中发挥着越来越重要的作用,本文阐述了国内外在飞机设计中广泛使用的结构强度计算,多体动力学仿真、多学科多目标结构优化、内外流场分析、非线性有限元分析、疲劳强度分析、电磁仿真分析,机电液联合仿真分析等,…
MIL-STD-1553B 双通道单功能4M功能模块
双通道MIL-STD-1553B总线通讯模块 32bi,33 MHz CPCI/PCI/总线 每个通道为A、B双冗余总线 单功能可设置BC/RT/BM一种工作模式 数据传输率: 4Mbps 支持32位时标, 时标精度0.25微秒 软件可设詈应答超时: 0-32767s 大容量的数…

Verilog功能模块——同步FIFO
前言 FIFO功能模块分两篇文章,本篇为同步FIFO,另一篇为异步FIFO,传送门:
Verilog功能模块——异步FIFO-CSDN博客
同步FIFO实现起来是异步FIFO的简化版,所以,本博文不再介绍FIFO实现原理,感兴趣…
Qt+C++串口调试接收发送数据曲线图
程序示例精选 QtC串口调试接收发送数据曲线图 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言
这篇博客针对<<QtC串口调试接收发送数据曲线图>>编写代码,代码整洁,规则&…
使用PSIM软件生成DSP28335流水灯程序
最近在学习DSP28335芯片,然后在使用PSIM仿真软件时发现这个仿真软件也支持28335芯片,于是就想学习下如何在PSIM软件中使用DSP28335芯片。在PSIM自带的官方示例中有使用DSP28335芯片的相关例子。
工程下载链接 https://download.csdn.net/download/qq_20…
电路设计(15)——篮球赛24秒违例倒计时报警器的proteus仿真
1.设计要求 设计、制作一个篮球赛24秒违例倒计时报警器。要求: (1)具有倒计时功能。可完整实现从“24”秒开始依序倒计时并显示倒计时过程,显示时间间隔为1秒。 (2)具有消隐功能。当“24”秒倒计时…
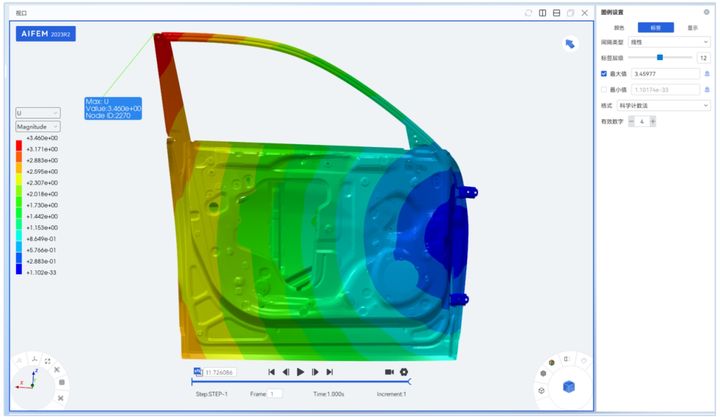
【产品】智能结构仿真软件AIFEM 2023R2新版本功能介绍
AIFEM是由天洑自主研发的一款通用的智能结构仿真软件,助力用户解决固体结构相关的静力学、动力学、振动、热力学等实际工程问题,软件提供高效的前后处理工具和高精度的有限元求解器,帮助用户快速、深入地评估结构的力学性能,加速产…

Verilog入门设计(三)——组合电路和逻辑电路的仿真
数字电路仿真一、测试平台(Test Bench)1、测试程序一般结构2、激励信号产生方式举例2.1 initial语句产生激励信号2.2 always语句产生激励信号二、组合电路的仿真1、8位乘法器的仿真2、8位加法器的仿真3、2选1数据选择器的仿真三、时序电路的仿真8位计数器…
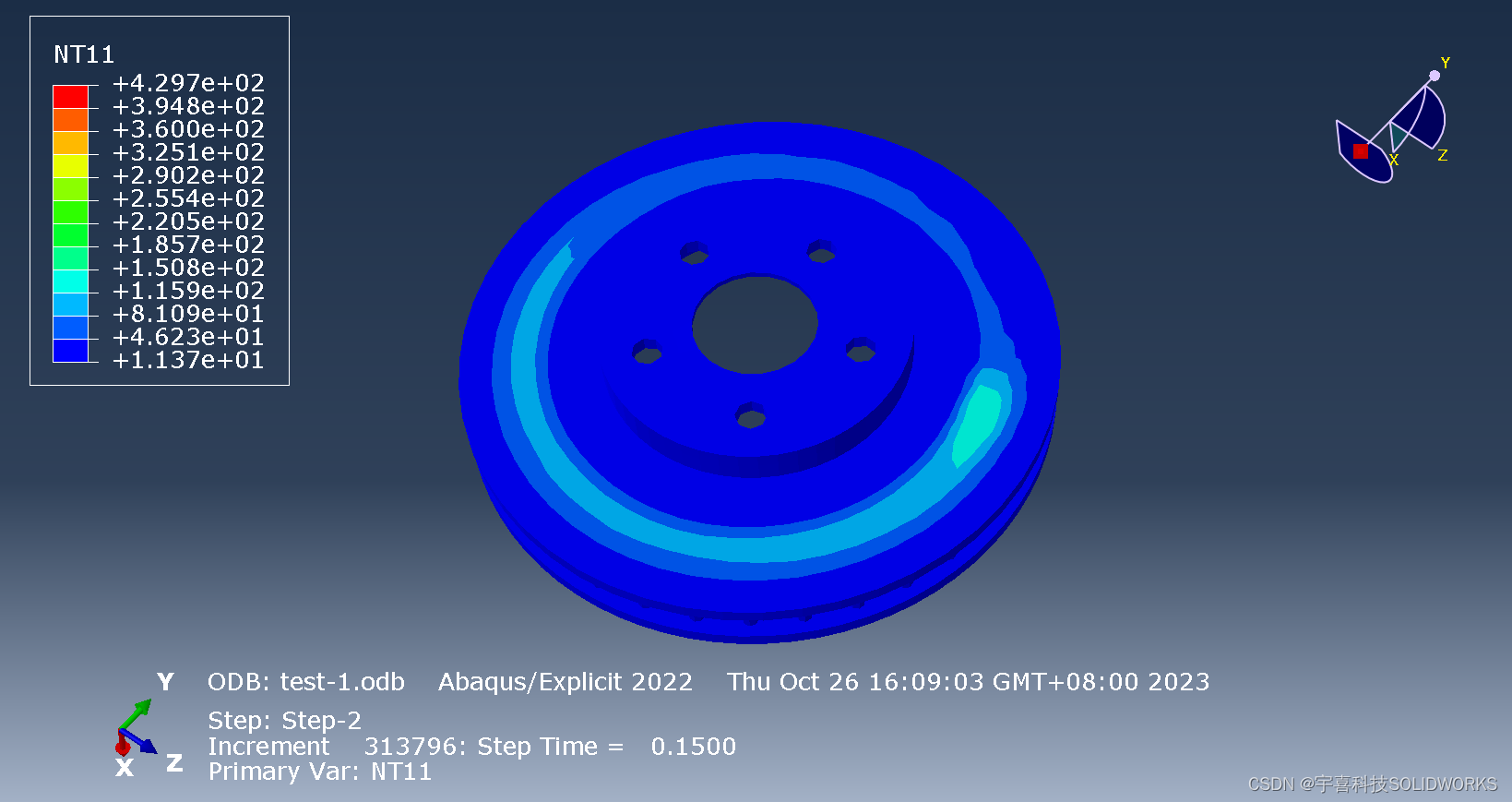
如何使用Abaqus进行摩擦生热仿真
Abaqus除了可以对结构进行强度分析,同样也有强大的固体传热分析功能,下面通过一个简单的实例演示Abaqus的双向热固耦合分析。
因为本案例涉及物体表面辐射,因此需要定义绝对零度和输入史蒂夫-波兹曼常数,如下: 本次分…

【数字电路】MacBook使用iverilog进行数字电路仿真
安装流程
在终端中用brew包管理工具进行安装仿真工具:
编译verilog代码:
brew install icarus-verilog编译verilog代码:
brew install verilatorMacOS系统显示UNIX GUI
brew install xquartz可视化仿真波形图:
brew install gtk…
2023.10.14 培训总结
培训内容 数字模型联合仿真及集成测试技术 MBSE(Model-Based-System-Engiaeering) 参数化建模参数化仿真
产生的疑问
支持面向对象支持CAE CFD工具优化工具
飞机的业务功能 开发分布式架构 新技术
WSDL协议DDS 发布/订阅SAOPCORBA
明显开发者 Chris Garrett 美…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化
在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现…

在仿真环境下基于数据包和RGB-D相机运行ORB_SLAM2功能包
目录
1、仿真环境
2、安装功能包及其依赖
3、功能演示 ORB_SLAM是基于特征点的实时单目slam功能包,发布于2015年。翌年,作者又发布了支持Monocular(单目)、RGB-D(深度)、Stereo(双目)摄像头的…

对Simulink中scope进行进一步的设置
对Simulink中scope进行进一步的设置
首先运行MATLAB.m文件的初始化程序(如有的话)和Simulink模型,然后在命令窗口敲入以下两行代码(因为仿真中的scope都是默认设置,而且Simulink模型参数的初始化多是有专门的.m file&…

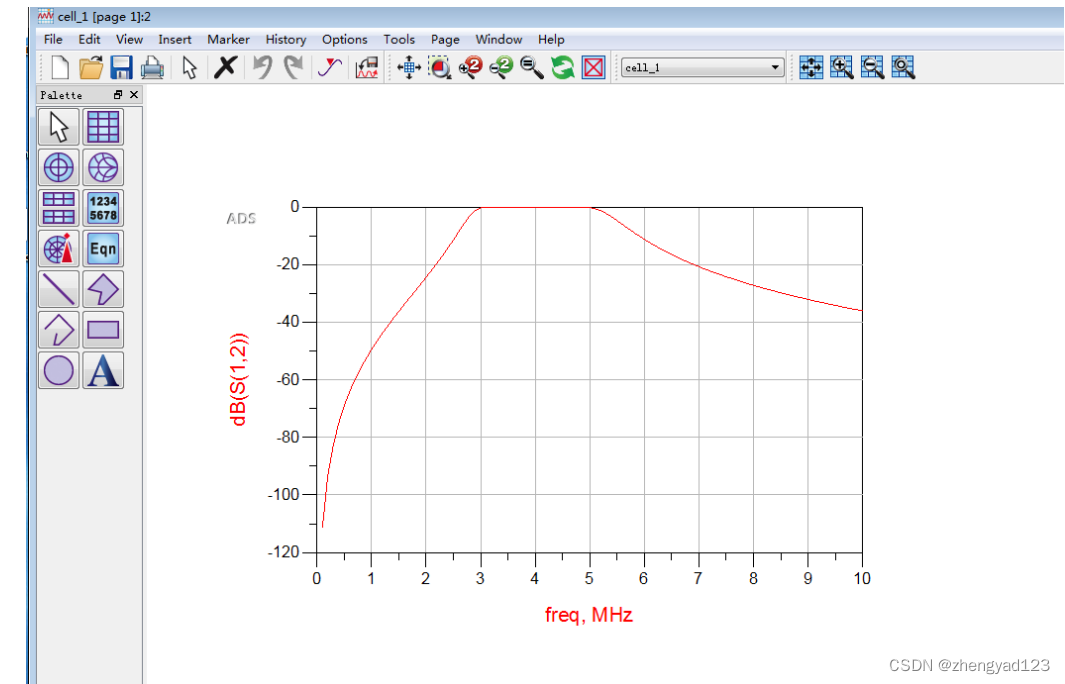
有源滤波器: 基于UAF42的50Hz陷波器仿真
上一小节,我们设计出一个基于UAF42的50Hz陷波器。在本 小节,我们将使用免费的仿真软件TINA对这个电路进行仿真分析。具体原理图如下所示。 其中3.1831M欧的电阻用两个E96标准的电阻串联组成。一个是3.16M欧,另一个为23.09K欧。选用E96标准电阻…
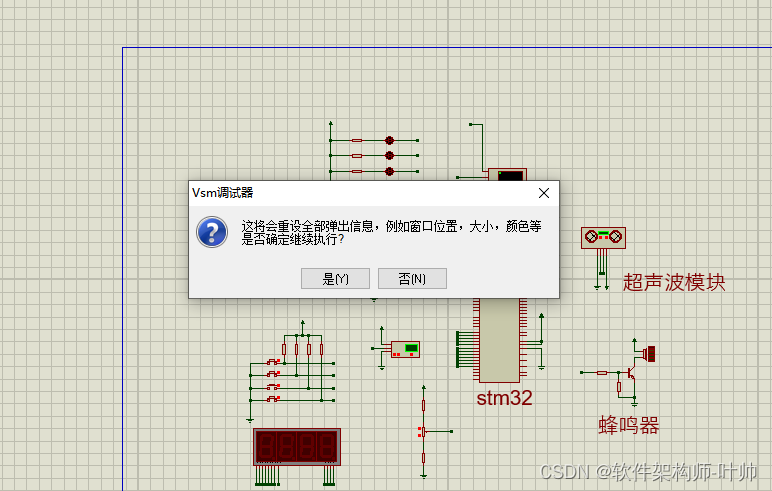
protues仿真时有时候串口虚拟中端不弹窗的问题
在使用proteus的时候,有时候你会发现点击调试开始运行后,串口虚拟终端没有自动弹窗的问题,其实照成这种现象的原因是你在使用的过程中移动了器件位置或者是对整个视窗使用鼠标滚动进行缩放了,如果要重新弹窗则需要进行以下操作:
…
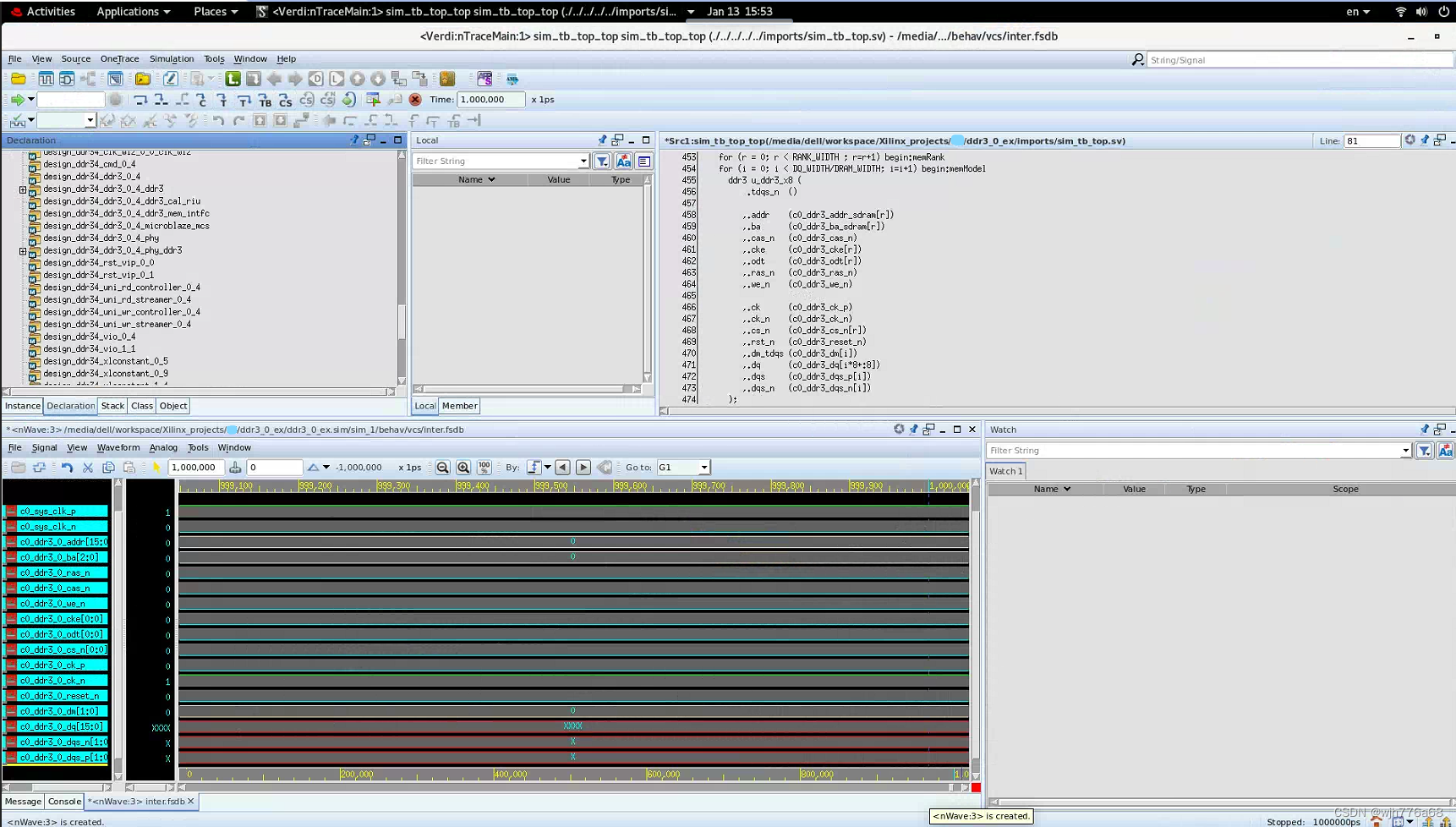
【RHEL】Vivado调用VCS+Verdi联合仿真报错解决
问题描述 在使用VCS Verdi仿真Vivado工程时,点击行为仿真按钮进度条窗口消失后,Verdi窗口并未出现,查看消息报错如下:
vcs: line 34205: 119837 Segmentation fault (core dumped) ${TOOL_HOME}/bin/cfs_ident_exec -f ${X…
FPGA | 详解FPGA开发仿真以及静态时序分析
【往期回顾】
带你深入了解FPGA开发设计之设计输入&综合
详解FPGA开发设计之布局布线&约束 仿真 Simulation
在经过前面从设计输入到综合再到布局布线过程的介绍后,我们来集中探讨一下,在这些过程中涉及到的相应的仿真。
仿真,字…
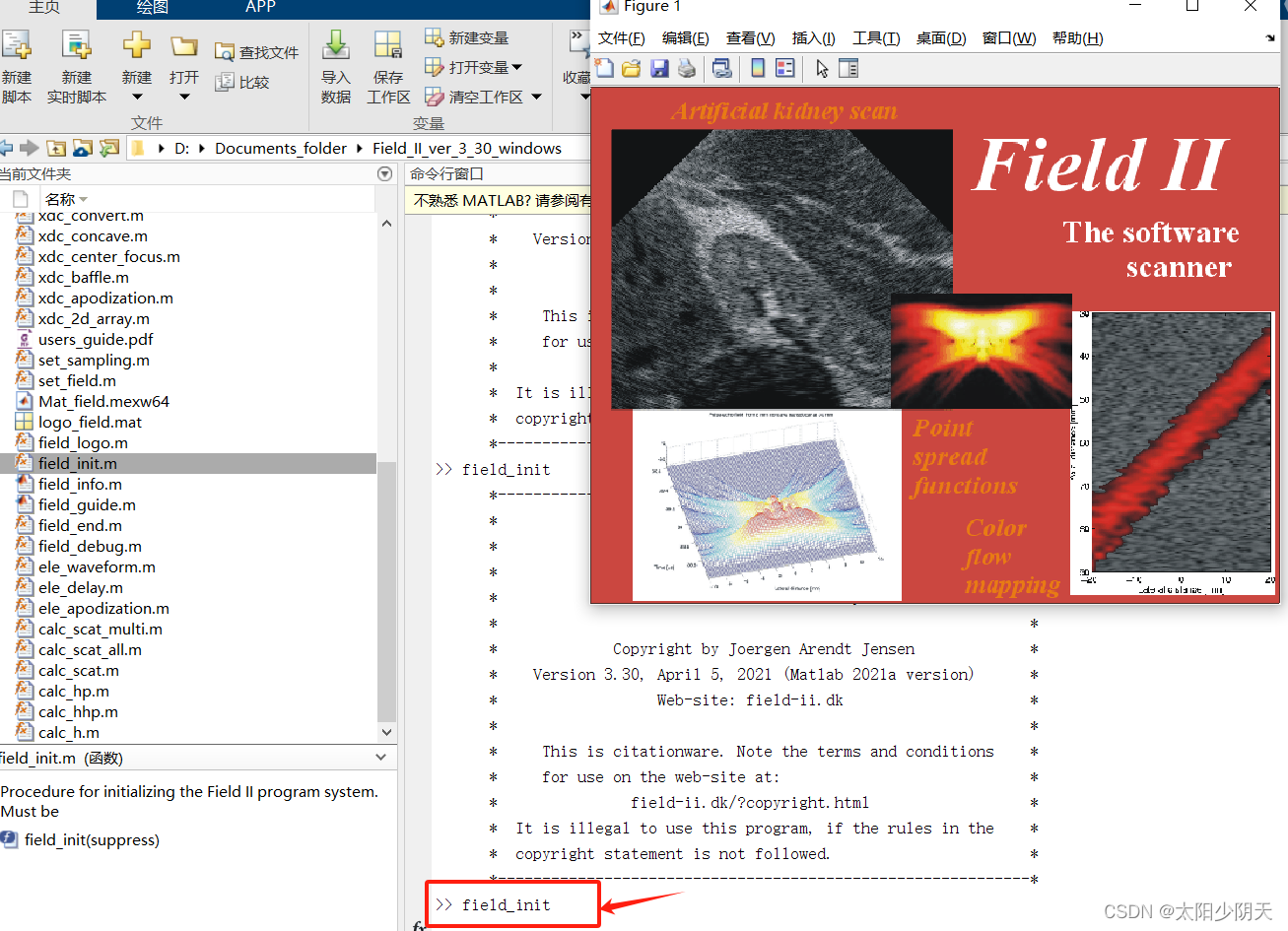
Field II 仿真软件——安装
1. 去官网下载文件压缩包
Field II Ultrasound Simulation Program (field-ii.dk) 在Download页面下载符合自己系统的压缩包。 2. 解压压缩文件,然后将这个文件夹添加到matlab的路径中,如下图所示:
3. 在matlab命令行输入:field…
Proteus仿真--单个数码管循环显示0-9(仿真文件+程序)
本文主要介绍基于51单片机的单个数码管循环显示0-9,Proteus仿真(完整仿真源文件及代码见文末链接) 仿真运行视频 Proteus仿真--单个数码管循环显示0-9(仿真文件程序) 附完整Proteus仿真资料代码资料
百度网盘链接: ht…

Vega Prime入门教程12.10:DevToolCRO与部署
本文首发于:Vega Prime入门教程12.10:DevToolCRO与部署
开发与运行
Vega Prime授权分为两种:
开发授权,在授权证书里面表现为*_dev运行授权,在授权证书里面表示为*_rtl
开发程序时使用开发授权,授权工具…
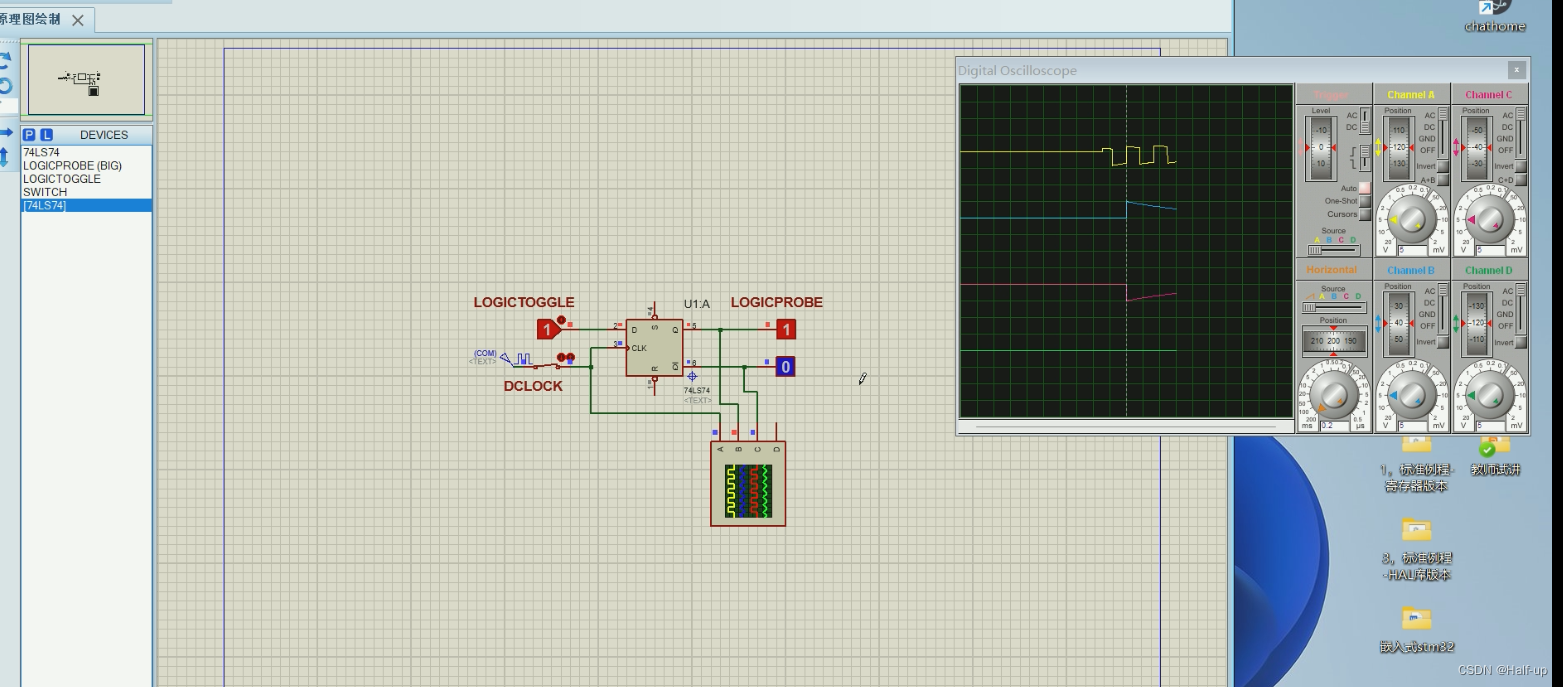
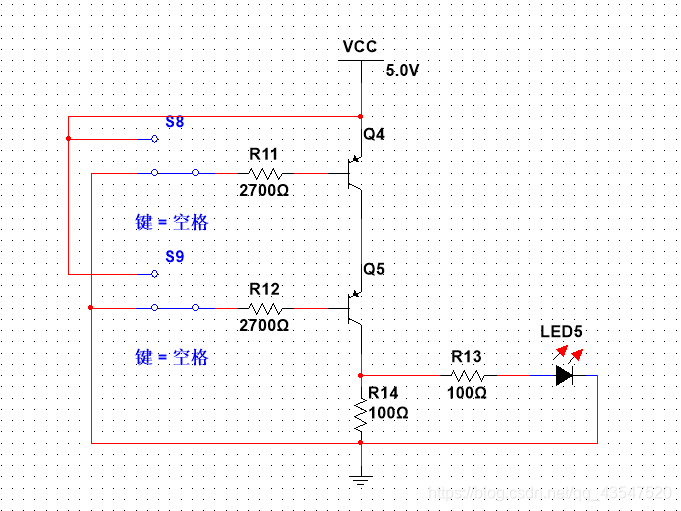
独立元器件搭建的逻辑门电路和仿真(一)
有时候我们搭电路时只需要实现一个简单的逻辑,但用一个4门的集成电路来设计未免过于昂贵与占面积,而且IC里没用到的门电路又必须拉高或拉低,相当烦琐。鉴于简化电路的需要我整理了一套用三极管、二极管、电阻组成的逻辑门电路。 1.与门 只有开…

MWORKS--同元软控MWORKS介绍、安装与使用
MWORKS--同元软控MWORKS介绍、安装与使用1 同元软控介绍1.1 同元软控简介1.2 同元软控发展历史2 MWORKS介绍2.1 MWORKS简介2.2 MWORKS产品描述3 装备数字化3.1 发展3.2 内涵3.3 系统模型发展成为产品的一部分3.4 MWORKS系统模型数据管理3.4 MWORKS为装备数字化提供的套件参考1 …

Silvaco TCAD仿真1——TCAD概述
TCAD介绍
TCAD(Technology Computer Aided Design):半导体工艺模拟以及器件模拟工具。 TCAD是EDA的一个分支。
process simulation:semiconductor structure fabrication。device simulation:semiconductor device o…
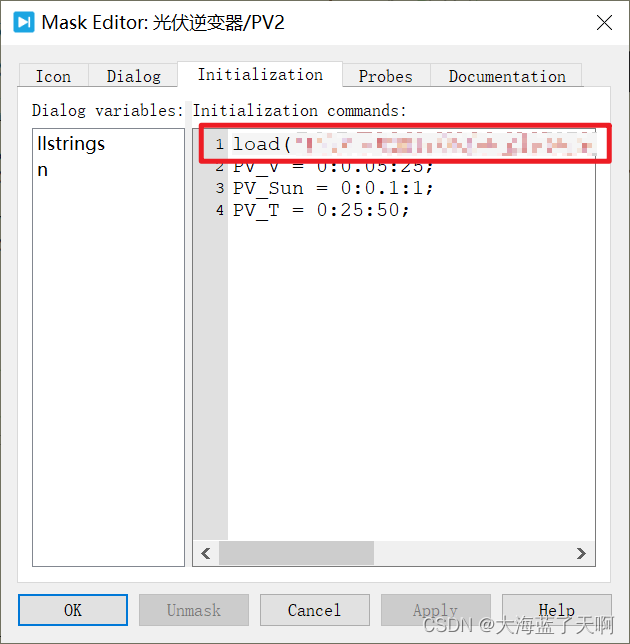
如何将simulink中的元件(光伏板)导入到plecs中使用
simulink中有一些元件在plecs中是没有的,如果想要直接使用simulink的库,可以这样操作:
1
新建mdl文件(simulink的文件类型),并在该文件中搭建好想要的模型、元件(只放想要导出的元件就可以了&…

单片机c51中断 — 中断嵌套实例IE0的置位和撤销
项目文件
文件
关于项目的内容知识点可以见专栏单片机原理及应用 的第五章,中断 根据下原理图,编程验证二级外部中断嵌套效果。其中K0定为低优先级中断源,K1为高优先级中断源。此外,利用发光二极管D1验证外部中断请求标志IE0在脉…
Proteus仿真之LCD1602
1.项目简介:利用Proteus仿真在LCD1602上显示字母。
2.设计思路:首先要读懂LCD1602的时序图和每一个端口高低电平时的含义。 然后,通过操作的端口的高低电平来达到操作数据的目的。主要思路是,根据端口的组合来,将数据…
games103——作业3
实验三主要使用FEM和hyperelastic模型完成弹性体的模拟 完整项目已上传至github。 文章目录 Linear finite element method(FEM)二维空间有限元方法变形梯度(Deformation Gradient)格林应变(Green Strain)应变能量密度函数(Strain Energy Density Function)力(Force) Finite Vo…
【Ansys Fluent Web 】全新用户界面支持访问大规模多GPU CFD仿真
基于Web的技术将释放云计算的强大功能,加速CFD仿真,从而减少对硬件资源的依赖。 主要亮点
✔ 使用Ansys Fluent Web用户界面™(UI),用户可通过任何设备与云端运行的仿真进行远程交互 ✔ 该界面通过利用多GPU和云计算功…

OpenRTI学习(1)
1. OpenRTI介绍 一个实现了rti1516、rti1516e以及RTI13标准接口的RTI库。
主要功能包括:
简单易用C接口(JAVA提供对应接口,未编码实现)扩展性高实现了RTI标准树层次的服务器结构内存零拷贝仅依赖于c98编译器/stl或更新版本
2. OpenRTI安装 通常使用cm…

Ti TINA 仿真软件 下载
问:我为什么选择TINA?
答:完全免费 公众号 工程师看海 后台回复:tina
可得到tina英文版、中文版安装包
TINA-TI 是对各种基本电路和高级电路(包括复杂架构)进行设计、测试和故障排除的理想选择…
Prescan C++仿真代码自动生成
欢迎使用 PrescanSimCppGenerator 1.0 代码仓库 文章目录 项目简介版本说明项目申明技术支持使用指南软件要求变量设置WindowsUbuntu 代码删减prescan_python_dmapi.pysensors and generators 使用步骤WindowsUbuntu 代码详解进阶应用SimCppBridge使用指南软件环境 Windows(Sim…

《信息与编码》考试复习笔记4----第四章离散信道容量
系列文章链接目录 一、《信息与编码》考试复习笔记1----第一章概论 二、《信息与编码》考试复习笔记2----第二章离散信息源 三、《信息与编码》考试复习笔记2----第二章离散信息源相关例题 四、《信息与编码》考试复习笔记3----第三章无失真离散信源编码(重要&#…

(一)LTspice简介2
文章目录前言一、LTspice的仿真过程二、spice的模型三、LTspice的工具栏和快捷键四、LTspice中的数量级前言
上一节我们学习了LTspice的安装,很简单,无脑安装 (一)LTspice安装 这一节我们继续学习LTspice的简介,主要包…
【AI视野·今日Robot 机器人论文速览 第六十一期】Tue, 24 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Tue, 24 Oct 2023 Totally 50 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Robot Fine-Tuning Made Easy: Pre-Training Rewards and Policies for Autonomous Real-World Reinforcement Learning Autho…

单片机c51中断 — 中断键控流水灯
项目文件
文件
关于项目的内容知识点可以见专栏单片机原理及应用 的第五章,中断 在第4章的实例2中,按键检测是采用查询法进行的,其流程图如图所示 问题是这样的:由于查询法 -按键查询、标志位修改及彩灯循环几个环节是串联关系…

【软件相关】Proteus仿真STM32记录
文章目录 0 前期教程1 前言2 先说说建议的流程3 需要注意的事项3.1 供电网配置不要忘了3.2 ADC模块的使用3.3 元器件查询手册 4 一些小技巧 0 前期教程
【软件相关】Proteus 8入门教程
1 前言 最近接了一个项目,是基于Proteus仿真STM32的,虽然此前有听…